Incremental Learning of Retrievable Skills For Efficient Continual Task Adaptation
{kind=link}
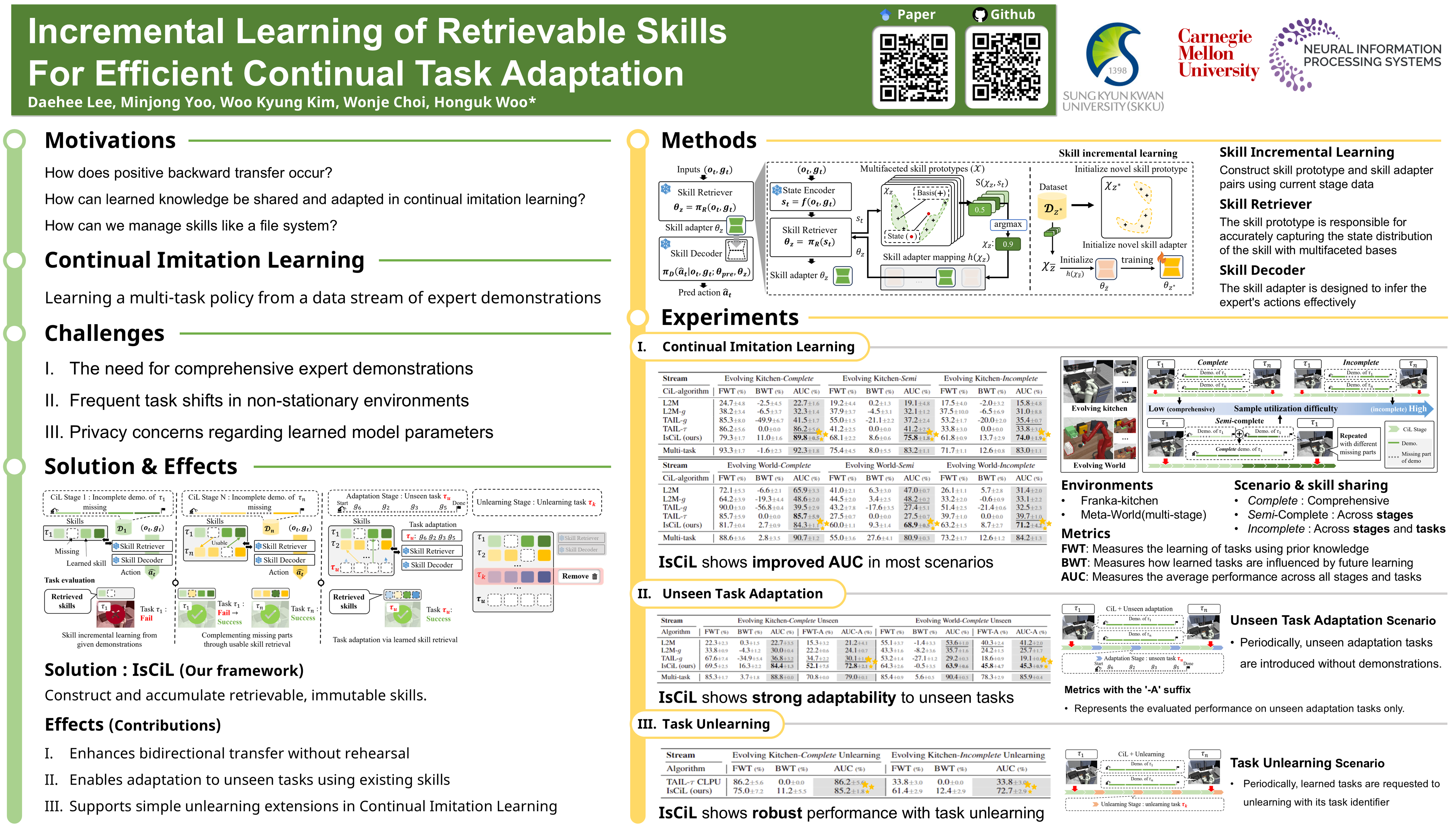
Abstract
Continual Imitation Learning (CiL) involves extracting and accumulating task knowledge from demonstrations across multiple stages and tasks to achieve a multi-task policy. With recent advancements in foundation models, there has been a growing interest in adapter-based CiL approaches, where adapters are established parameter-efficiently for tasks newly demonstrated. While these approaches isolate parameters for specific tasks and tend to mitigate catastrophic forgetting, they limit knowledge sharing among different demonstrations. We introduce IsCiL, an adapter-based CiL framework that addresses this limitation of knowledge sharing by incrementally learning shareable skills from different demonstrations, thus enabling sample-efficient task adaptation using the skills particularly in non-stationary CiL environments. In IsCiL, demonstrations are mapped into the state embedding space, where proper skills can be retrieved upon input states through prototype-based memory. These retrievable skills are incrementally learned on their corresponding adapters. Our CiL experiments with complex tasks in the Franka-Kitchen and Meta-World demonstrate the robust performance of IsCiL in both task adaptation and sample-efficiency. We also show a simple extension of IsCiL for task unlearning scenarios.