A PID Controller Approach for Adaptive Probability-dependent Gradient Decay in Model Calibration
{kind=link}
Abstract
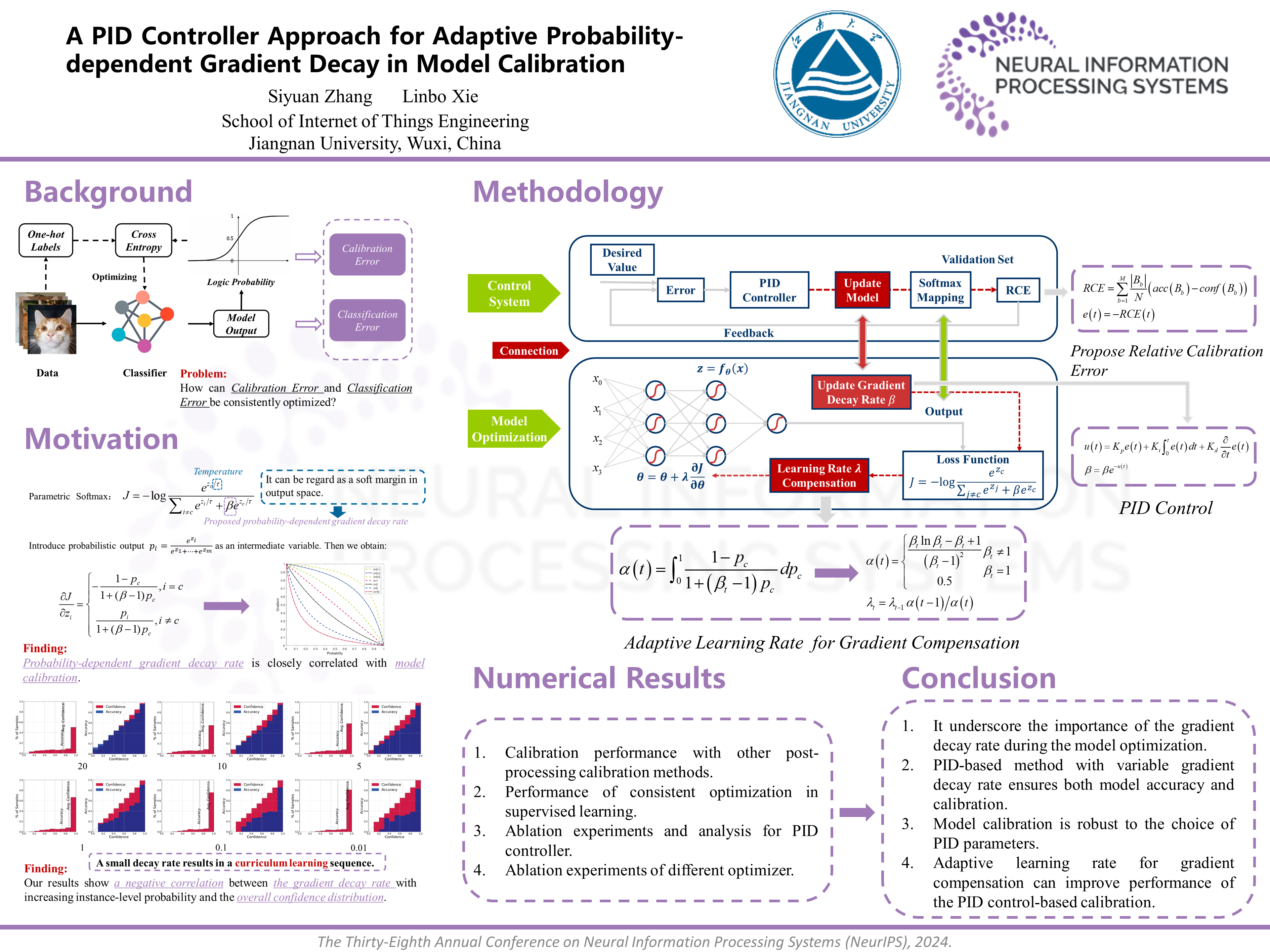
Modern deep learning models often exhibit overconfident predictions, inadequately capturing uncertainty. During model optimization, the expected calibration error tends to overfit earlier than classification accuracy, indicating distinct optimization objectives for classification error and calibration error. To ensure consistent optimization of both model accuracy and model calibration, we propose a novel method incorporating a probability-dependent gradient decay coefficient into loss function. This coefficient exhibits a strong correlation with the overall confidence level. To maintain model calibration during optimization, we utilize a proportional-integral-derivative (PID) controller to dynamically adjust this gradient decay rate, where the adjustment relies on the proposed relative calibration error feedback in each epoch, thereby preventing the model from exhibiting over-confidence or under-confidence. Within the PID control system framework, the proposed relative calibration error serves as the control system output, providing an indication of the overall confidence level, while the gradient decay rate functions as the controlled variable. Moreover, recognizing the impact of gradient amplitude of adaptive decay rates, we implement an adaptive learning rate mechanism for gradient compensation to prevent inadequate learning of over-small or over-large gradient. Empirical experiments validate the efficacy of our PID-based adaptive gradient decay rate approach, ensuring consistent optimization of model calibration and model accuracy.