PIVOT-R: Primitive-Driven Waypoint-Aware World Model for Robotic Manipulation
{kind=link}
Abstract
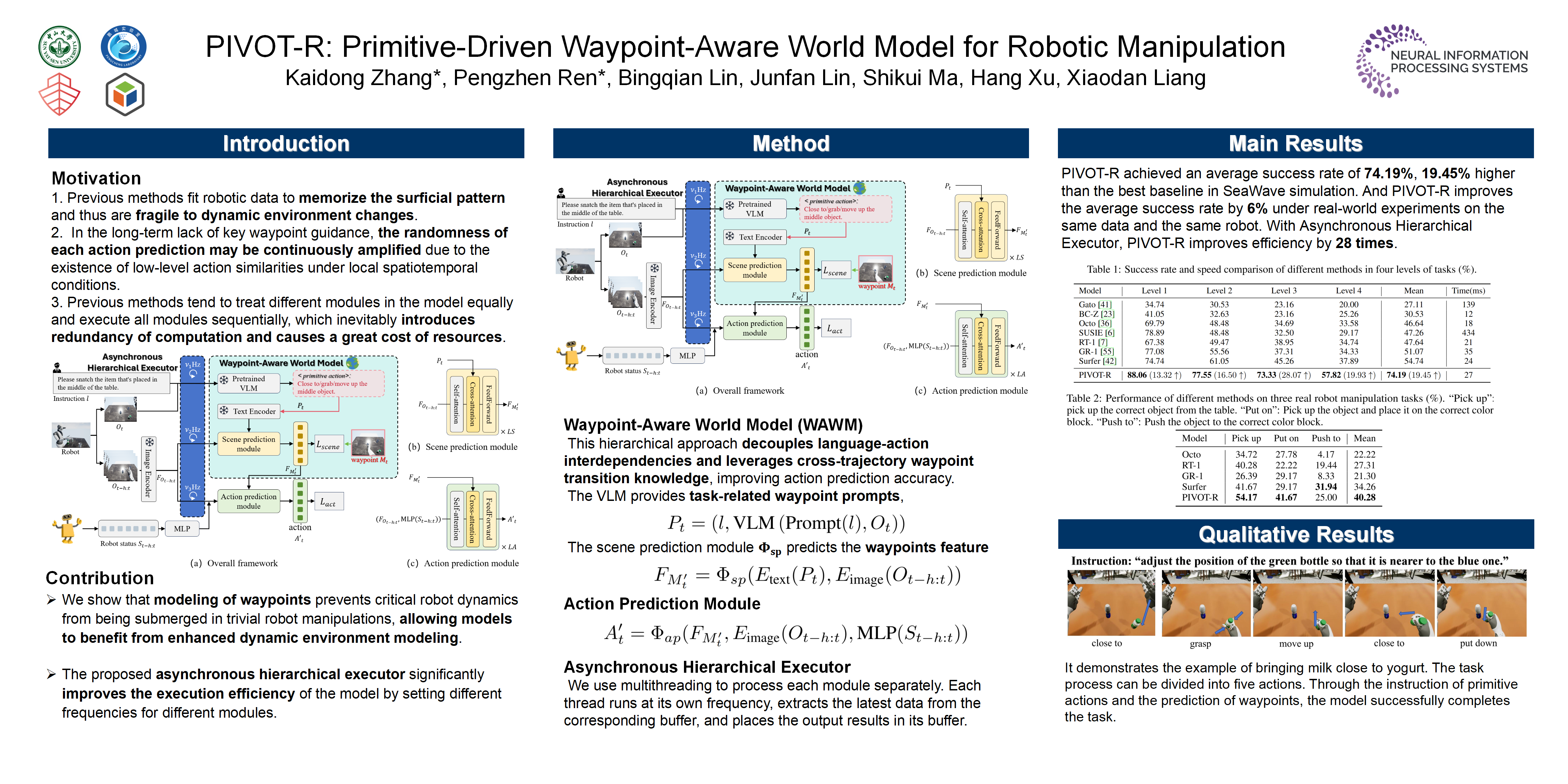
Language-guided robotic manipulation is a challenging task that requires an embodied agent to follow abstract user instructions to accomplish various complex manipulation tasks. Previous work generally maps instructions and visual perceptions directly to low-level executable actions, neglecting the modeling of critical waypoints (e.g., key states of “close to/grab/move up” in action trajectories) in manipulation tasks.To address this issue, we propose a PImitive-driVen waypOinT-aware world model for Robotic manipulation (PIVOT-R) that focuses solely on the prediction of task-relevant waypoints. Specifically, PIVOT-R consists of a Waypoint-aware World Model (WAWM) and a lightweight action prediction module. The former performs primitive action parsing and primitive-driven waypoint prediction, while the latter focuses on decoding low-level actions. Additionally, we also design an asynchronous hierarchical executor (AHE) for PIVOT-R, which can use different execution frequencies for different modules of the model, thereby helping the model reduce computational redundancy and improve model execution efficiency. Our PIVOT-R outperforms state-of-the-art (SoTA) open-source models on the SeaWave benchmark, achieving an average relative improvement of 19.45% across four levels of instruction tasks. Moreover, compared to the synchronously executed PIVOT-R, the execution efficiency of PIVOT-R with AHE is increased by 28-fold, with only a 2.9% drop in performance. These results provide compelling evidence that our PIVOT-R can significantly improve both the performance and efficiency of robotic manipulation.