N-agent Ad Hoc Teamwork
Caroline Wang ⋅ Muhammad Arrasy Rahman ⋅ Ishan Durugkar ⋅ Elad Liebman ⋅ Peter Stone
2024 Poster
{kind=link}
Abstract
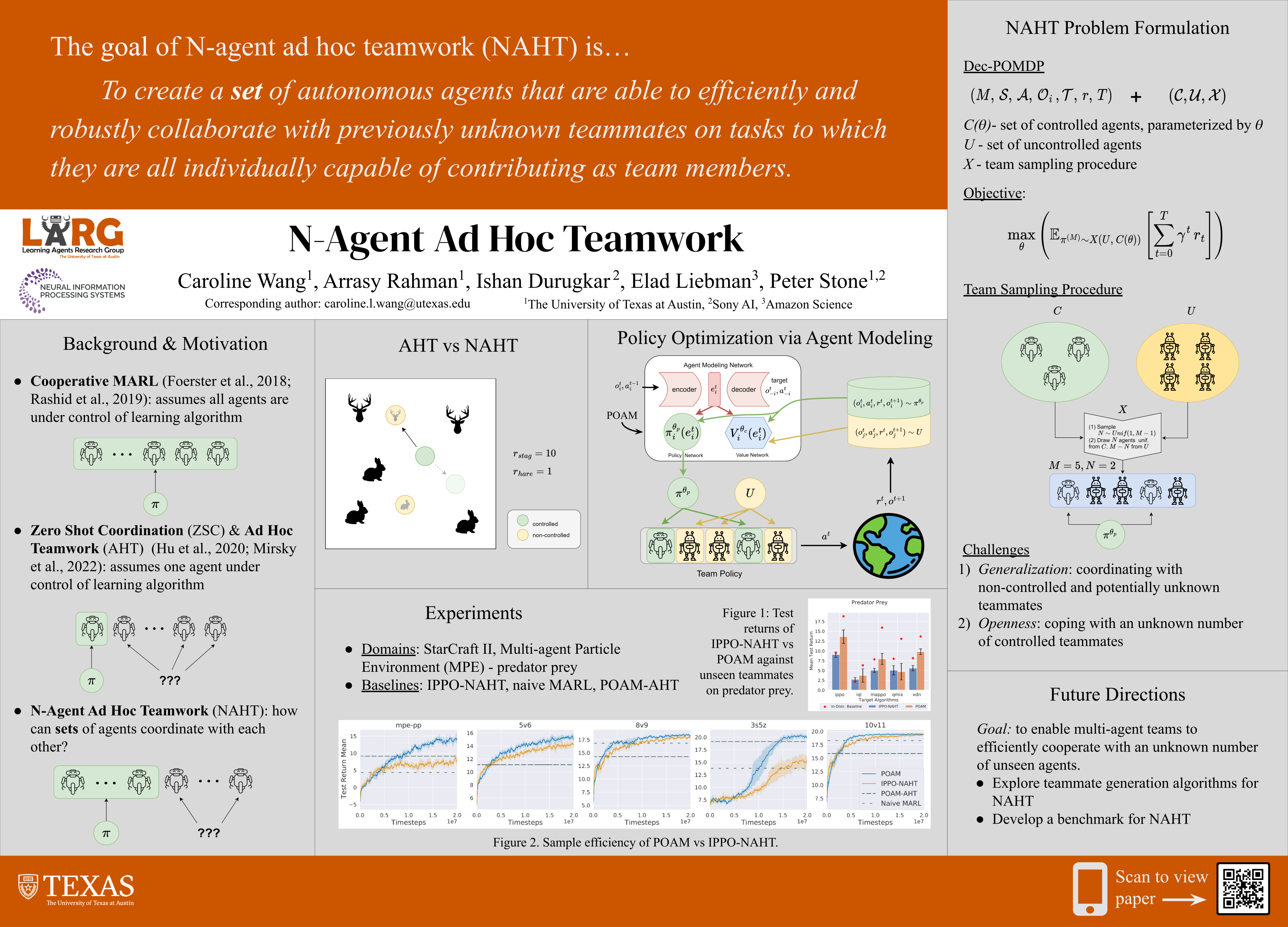
Current approaches to learning cooperative multi-agent behaviors assume relatively restrictive settings. In standard fully cooperative multi-agent reinforcement learning, the learning algorithm controls *all* agents in the scenario, while in ad hoc teamwork, the learning algorithm usually assumes control over only a *single* agent in the scenario. However, many cooperative settings in the real world are much less restrictive. For example, in an autonomous driving scenario, a company might train its cars with the same learning algorithm, yet once on the road, these cars must cooperate with cars from another company. Towards expanding the class of scenarios that cooperative learning methods may optimally address, we introduce $N$*-agent ad hoc teamwork* (NAHT), where a set of autonomous agents must interact and cooperate with dynamically varying numbers and types of teammates. This paper formalizes the problem, and proposes the *Policy Optimization with Agent Modelling* (POAM) algorithm. POAM is a policy gradient, multi-agent reinforcement learning approach to the NAHT problem, that enables adaptation to diverse teammate behaviors by learning representations of teammate behaviors. Empirical evaluation on tasks from the multi-agent particle environment and StarCraft II shows that POAM improves cooperative task returns compared to baseline approaches, and enables out-of-distribution generalization to unseen teammates.
Video
Chat is not available.
Successful Page Load