CRAYM: Neural Field Optimization via Camera RAY Matching
{kind=link}
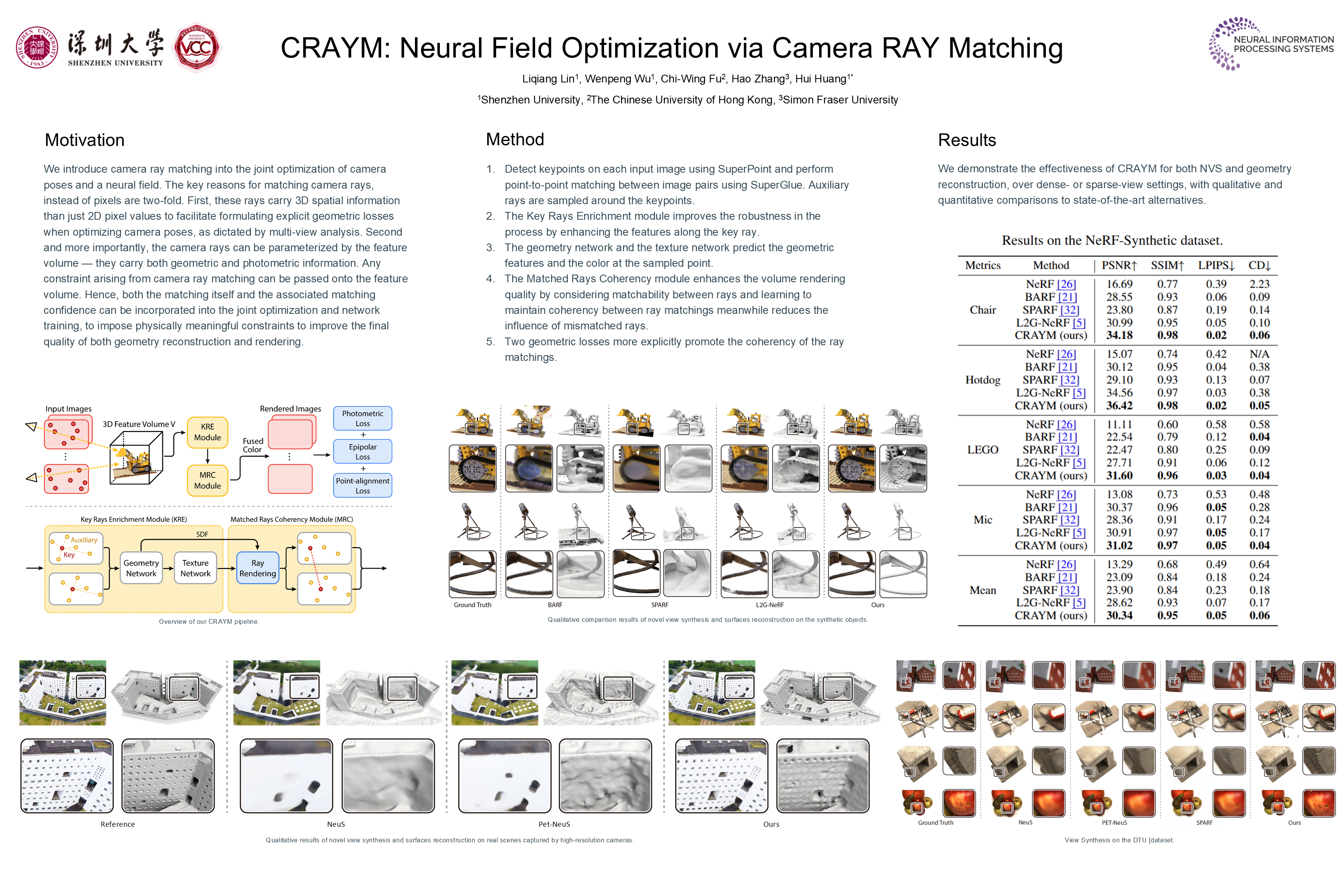
Abstract
We introduce camera ray matching (CRAYM) into the joint optimization of camera poses and neural fields from multi-view images. The optimized field, referred to as a feature volume, can be “probed” by the camera rays for novel view synthesis (NVS) and 3D geometry reconstruction. One key reason for matching camera rays, instead of pixels as in prior works, is that the camera rays can be parameterized by the feature volume to carry both geometric and photometric information. Multi-view consistencies involving the camera rays and scene rendering can be naturally integrated into the joint optimization and network training, to impose physically meaningful constraints to improve the final quality of both the geometric reconstruction and photorealistic rendering. We formulate our per-ray optimization and matched ray coherence by focusing on camera rays passing through keypoints in the input images to elevate both the efficiency and accuracy of scene correspondences. Accumulated ray features along the feature volume provide a means to discount the coherence constraint amid erroneous ray matching. We demonstrate the effectiveness of CRAYM for both NVS and geometry reconstruction, over dense- or sparse-view settings, with qualitative and quantitative comparisons to state-of-the-art alternatives.