{kind=link}
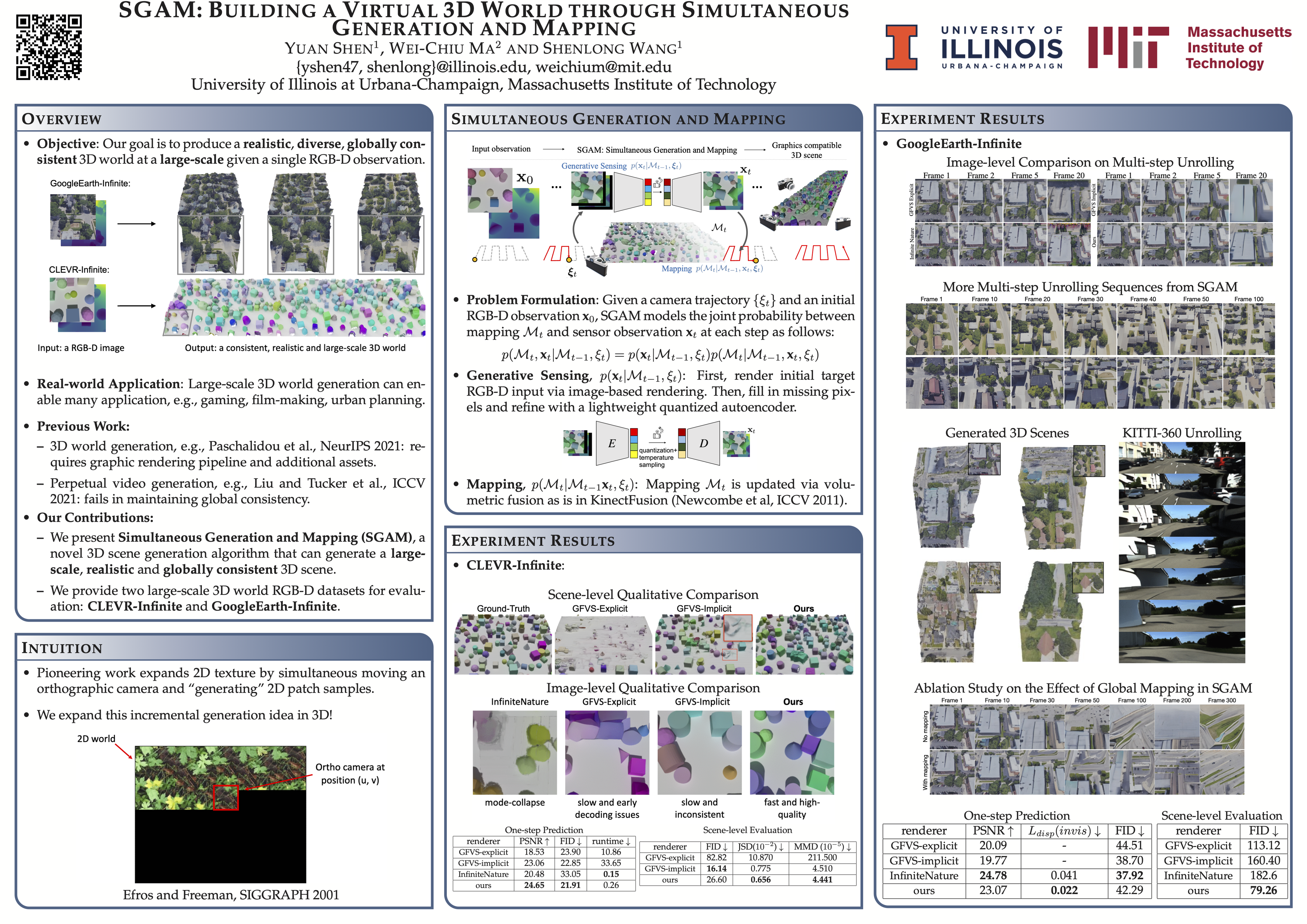
We present simultaneous generation and mapping (SGAM), a novel 3D scene generation algorithm. Our goal is to produce a realistic, globally consistent 3D world on a large scale. Achieving this goal is challenging and goes beyond the capacities of existing 3D generation or video generation approaches, which fail to scale up to create large, globally consistent 3D scene structures. Towards tackling the challenges, we take a hybrid approach that integrates generative sensor model- ing with 3D reconstruction. Our proposed approach is an autoregressive generative framework that simultaneously generates sensor data at novel viewpoints and builds a 3D map at each timestamp. Given an arbitrary camera trajectory, our method repeatedly applies this generation-and-mapping process for thousands of steps, allowing us to create a gigantic virtual world. Our model can be trained from RGB-D sequences without having access to the complete 3D scene structure. The generated scenes are readily compatible with various interactive environments and rendering engines. Experiments on CLEVER and GoogleEarth datasets demon- strates ours can generate consistent, realistic, and geometrically-plausible scenes that compare favorably to existing view synthesis methods. Our project page is available at https://yshen47.github.io/sgam.