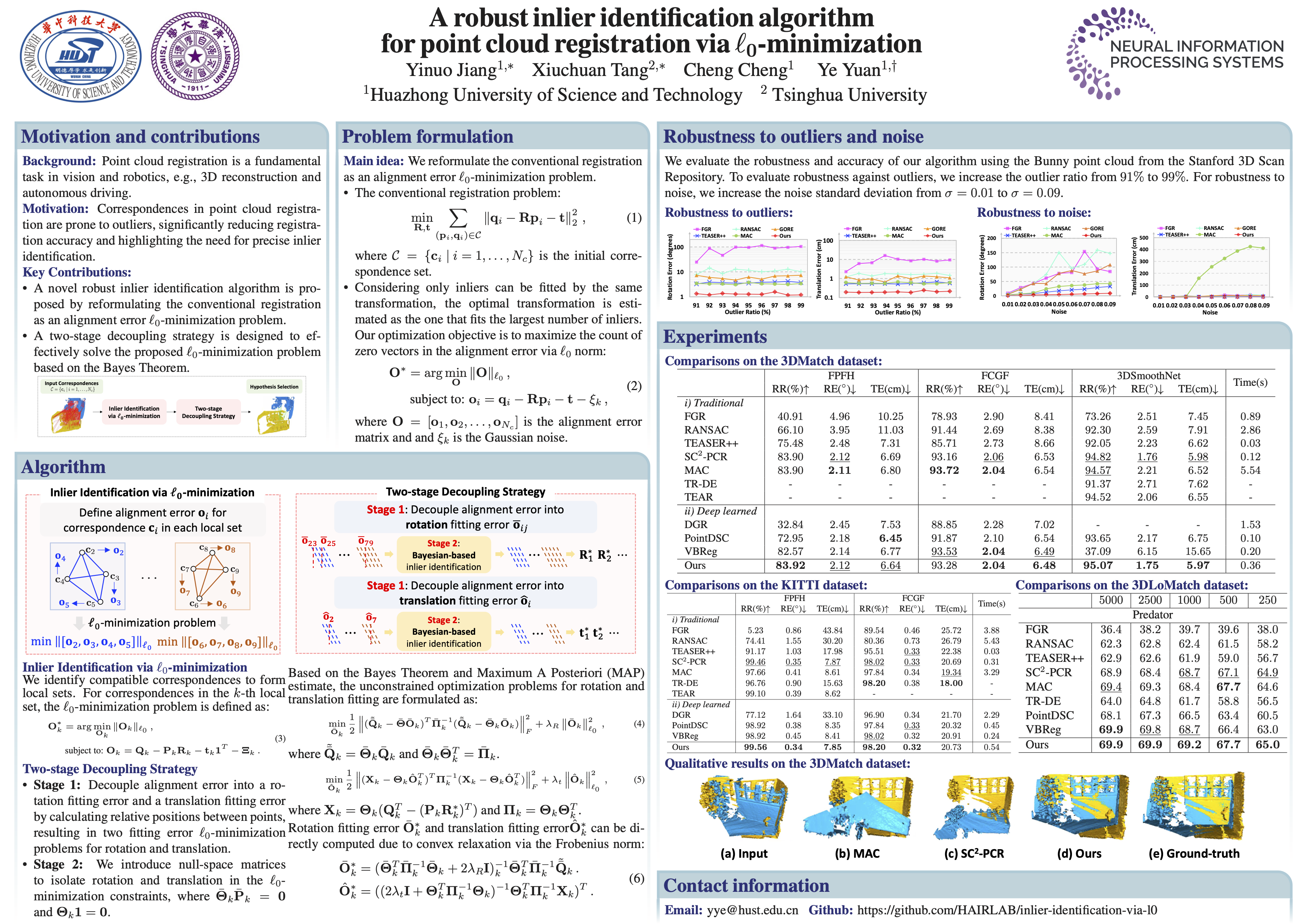
A robust inlier identification algorithm for point cloud registration via $\mathbf{\ell_0}$-minimization
Yinuo Jiang ⋅ Xiuchuan Tang ⋅ Cheng Cheng ⋅ Ye Yuan
2024 Poster
{kind=link}
Abstract
Correspondences in point cloud registration are prone to outliers, significantly reducing registration accuracy and highlighting the need for precise inlier identification. In this paper, we propose a robust inlier identification algorithm for point cloud registration by reformulating the conventional registration problem as an alignment error $\ell_0$-minimization problem. The $\ell_0$-minimization problem is formulated for each local set, where those local sets are built on a compatibility graph of input correspondences. To resolve the $\ell_0$-minimization, we develop a novel two-stage decoupling strategy, which first decouples the alignment error into a rotation fitting error and a translation fitting error. Second, null-space matrices are employed to decouple inlier identification from the estimation of rotation and translation respectively, thereby applying Bayesian theory to $\ell_0$-minimization problems and solving for fitting errors. Correspondences with the smallest errors are identified as inliers to generate a transformation hypothesis for each local set. The best hypothesis is selected to perform registration. We demonstrate that the proposed inlier identification algorithm is robust under high outlier ratios and noise through experiments. Extensive results on the KITTI, 3DMatch, and 3DLoMatch datasets demonstrate that our method achieves state-of-the-art performance compared to both traditional and learning-based methods in various indoor and outdoor scenes.
Video
Chat is not available.
Successful Page Load