Online Non-convex Learning in Dynamic Environments
Zhipan Xu ⋅ Lijun Zhang
2024 Poster
{kind=link}
Abstract
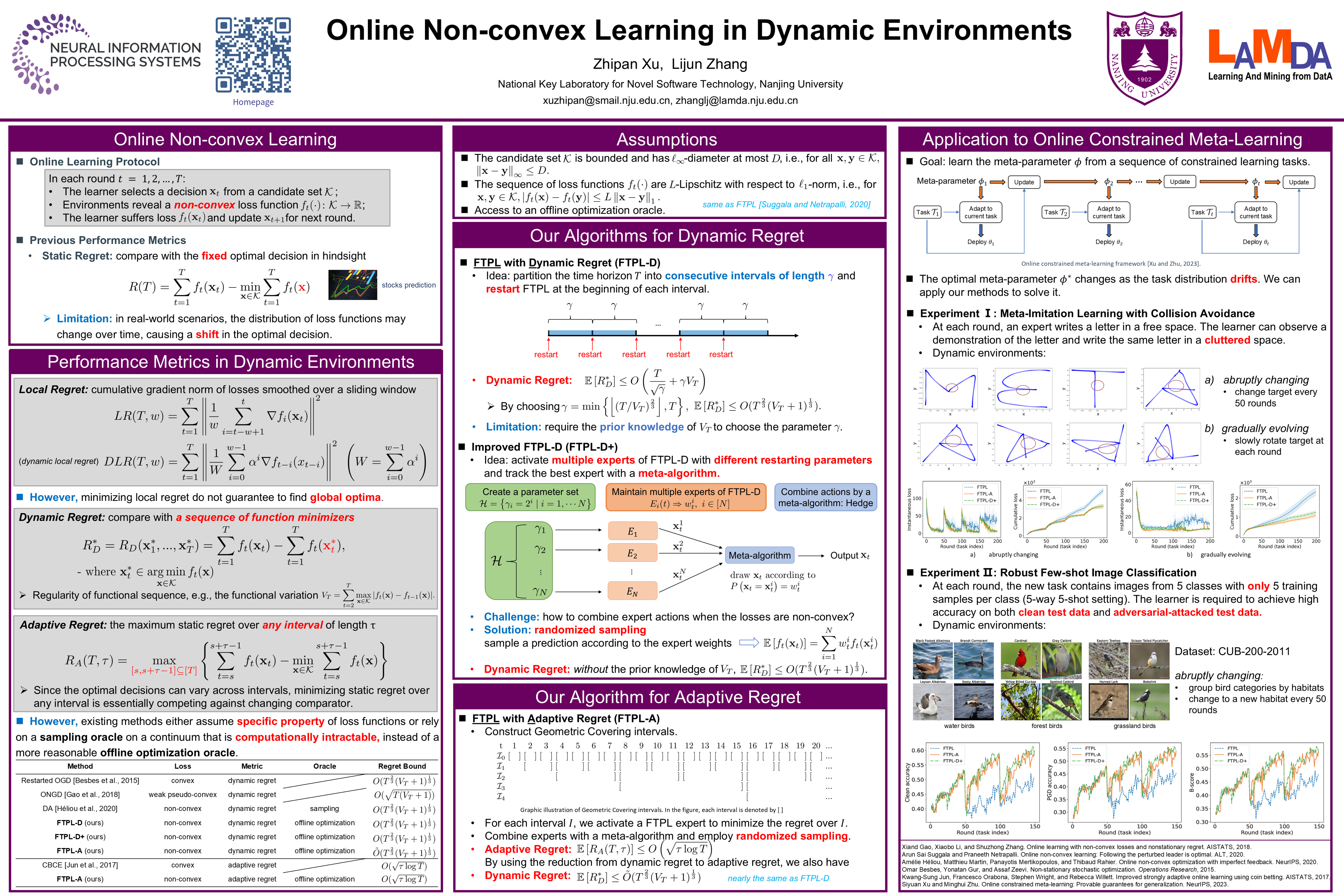
This paper considers the problem of online learning with non-convex loss functions in dynamic environments. Recently, Suggala and Netrapalli [2020] demonstrated that follow the perturbed leader (FTPL) can achieve optimal regret for non-convex losses, but their results are limited to static environments. In this research, we examine dynamic environments and choose \emph{dynamic regret} and \emph{adaptive regret} to measure the performance. First, we propose an algorithm named FTPL-D by restarting FTPL periodically and establish $O(T^\frac{2}{3}(V_T+1)^\frac{1}{3})$ dynamic regret with the prior knowledge of $V_T$, which is the variation of loss functions. In the case that $V_T$ is unknown, we run multiple FTPL-D with different restarting parameters as experts and use a meta-algorithm to track the best one on the fly. To address the challenge of non-convexity, we utilize randomized sampling in the process of tracking experts. Next, we present a novel algorithm called FTPL-A that dynamically maintains a group of FTPL experts and combines them with an advanced meta-algorithm to obtain $O(\sqrt{\tau\log{T}})$ adaptive regret for any interval of length $\tau$. Moreover, we demonstrate that FTPL-A also attains an $\tilde{O}(T^\frac{2}{3}(V_T+1)^\frac{1}{3})$ dynamic regret bound. Finally, we discuss the application to online constrained meta-learning and conduct experiments to verify the effectiveness of our methods.
Video
Chat is not available.
Successful Page Load