DiffuBox: Refining 3D Object Detection with Point Diffusion
{kind=link}
Abstract
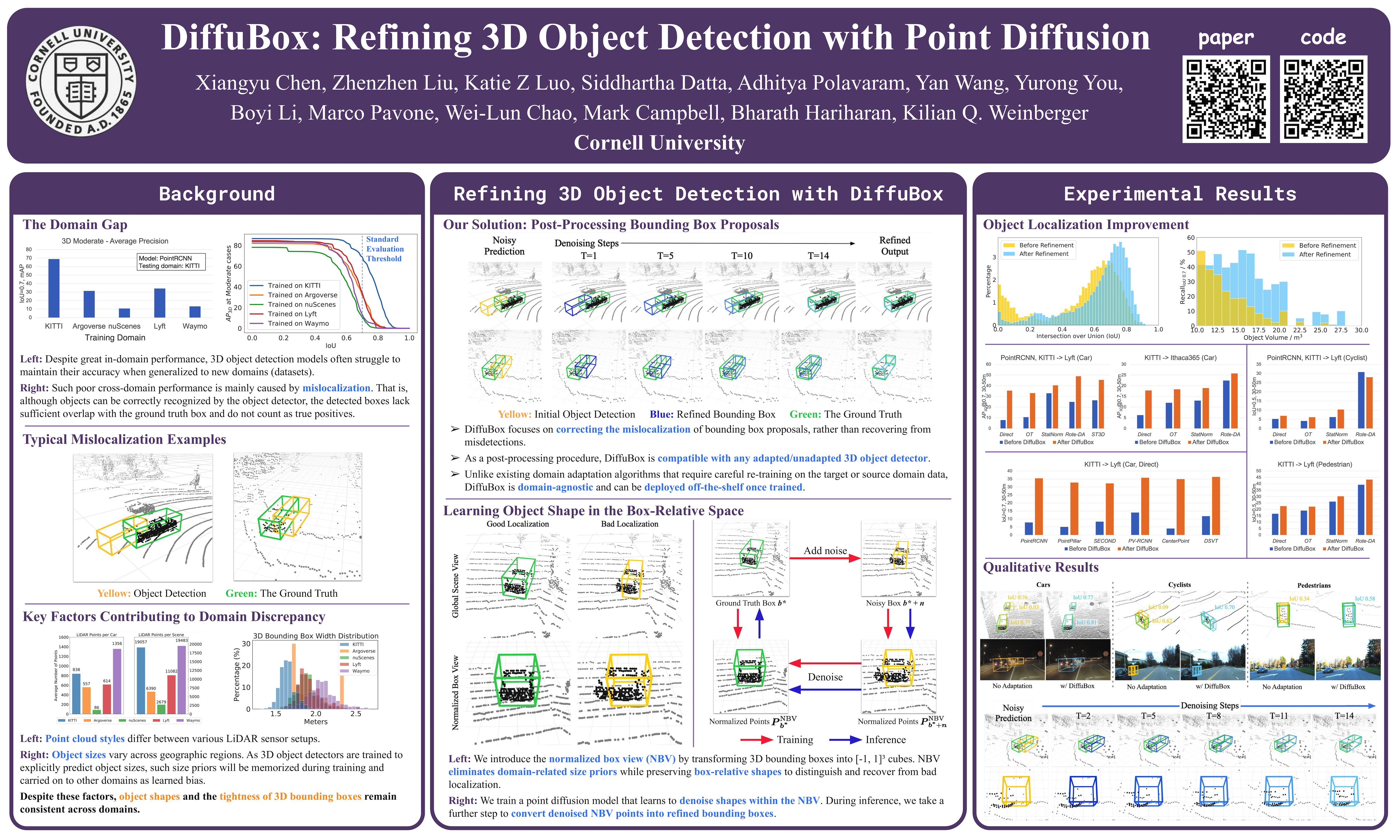
Ensuring robust 3D object detection and localization is crucial for many applications in robotics and autonomous driving. Recent models, however, face difficulties in maintaining high performance when applied to domains with differing sensor setups or geographic locations, often resulting in poor localization accuracy due to domain shift. To overcome this challenge, we introduce a novel diffusion-based box refinement approach. This method employs a domain-agnostic diffusion model, conditioned on the LiDAR points surrounding a coarse bounding box, to simultaneously refine the box's location, size, and orientation. We evaluate this approach under various domain adaptation settings, and our results reveal significant improvements across different datasets, object classes and detectors. Our PyTorch implementation is available at https://github.com/cxy1997/DiffuBox.