Dual-Diffusion for Binocular 3D Human Pose Estimation
{kind=link}
Abstract
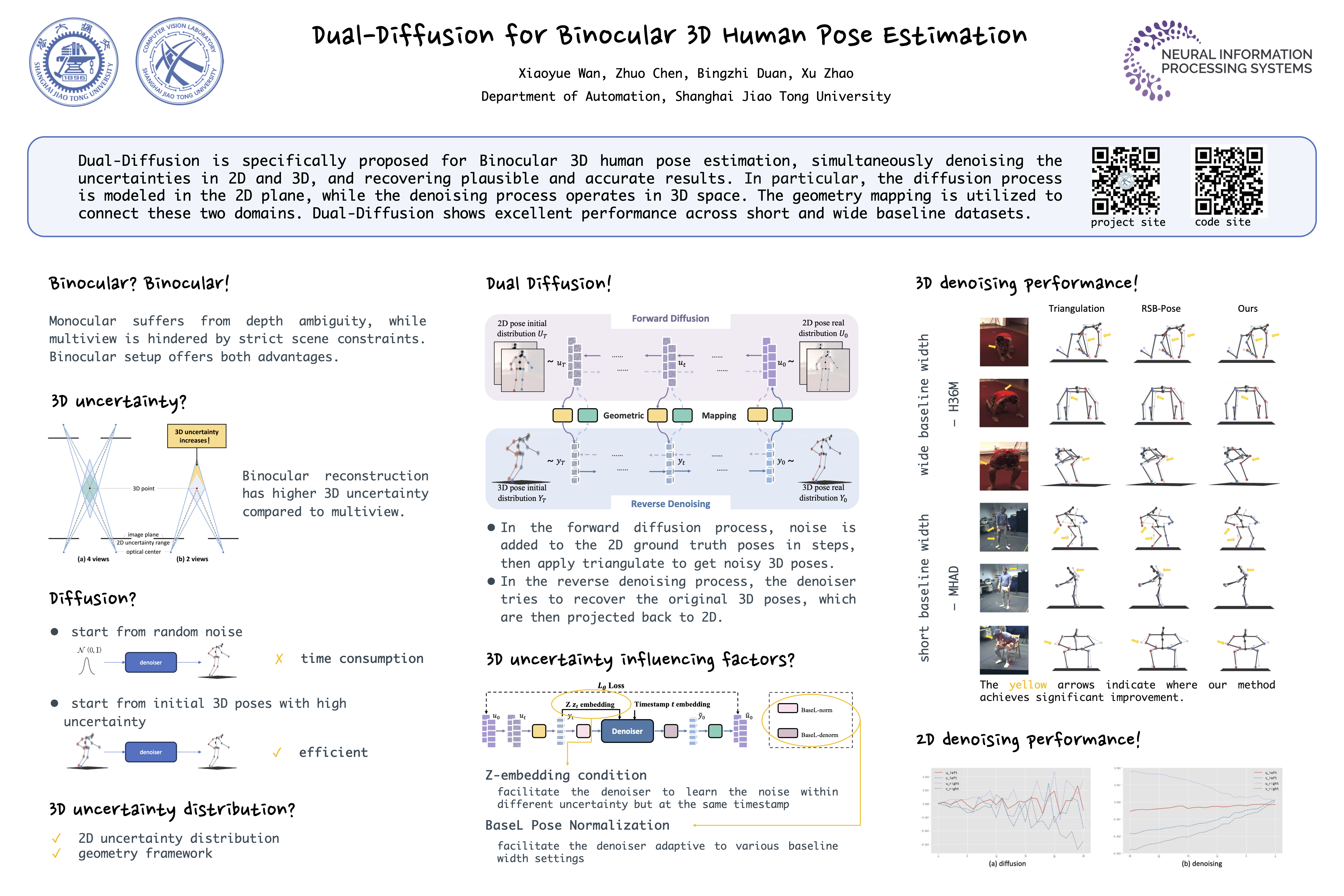
Binocular 3D human pose estimation (HPE), reconstructing a 3D pose from 2D poses of two views, offers practical advantages by combining multiview geometry with the convenience of a monocular setup. However, compared to a multiview setup, the reduction in the number of cameras increases uncertainty in 3D reconstruction. To address this issue, we leverage the diffusion model, which has shown success in monocular 3D HPE by recovering 3D poses from noisy data with high uncertainty. Yet, the uncertainty distribution of initial 3D poses remains unknown. Considering that 3D errors stem from 2D errors within geometric constraints, we recognize that the uncertainties of 3D and 2D are integrated in a binocular configuration, with the initial 2D uncertainty being well-defined. Based on this insight, we propose Dual-Diffusion specifically for Binocular 3D HPE, simultaneously denoising the uncertainties in 2D and 3D, and recovering plausible and accurate results. Additionally, we introduce Z-embedding as an additional condition for denoising and implement baseline-width-related pose normalization to enhance the model flexibility for various baseline settings. This is crucial as 3D error influence factors encompass depth and baseline width. Extensive experiments validate the effectiveness of our Dual-Diffusion in 2D refinement and 3D estimation. The code and models are available at https://github.com/sherrywan/Dual-Diffusion.