SCaR: Refining Skill Chaining for Long-Horizon Robotic Manipulation via Dual Regularization
{kind=link}
Abstract
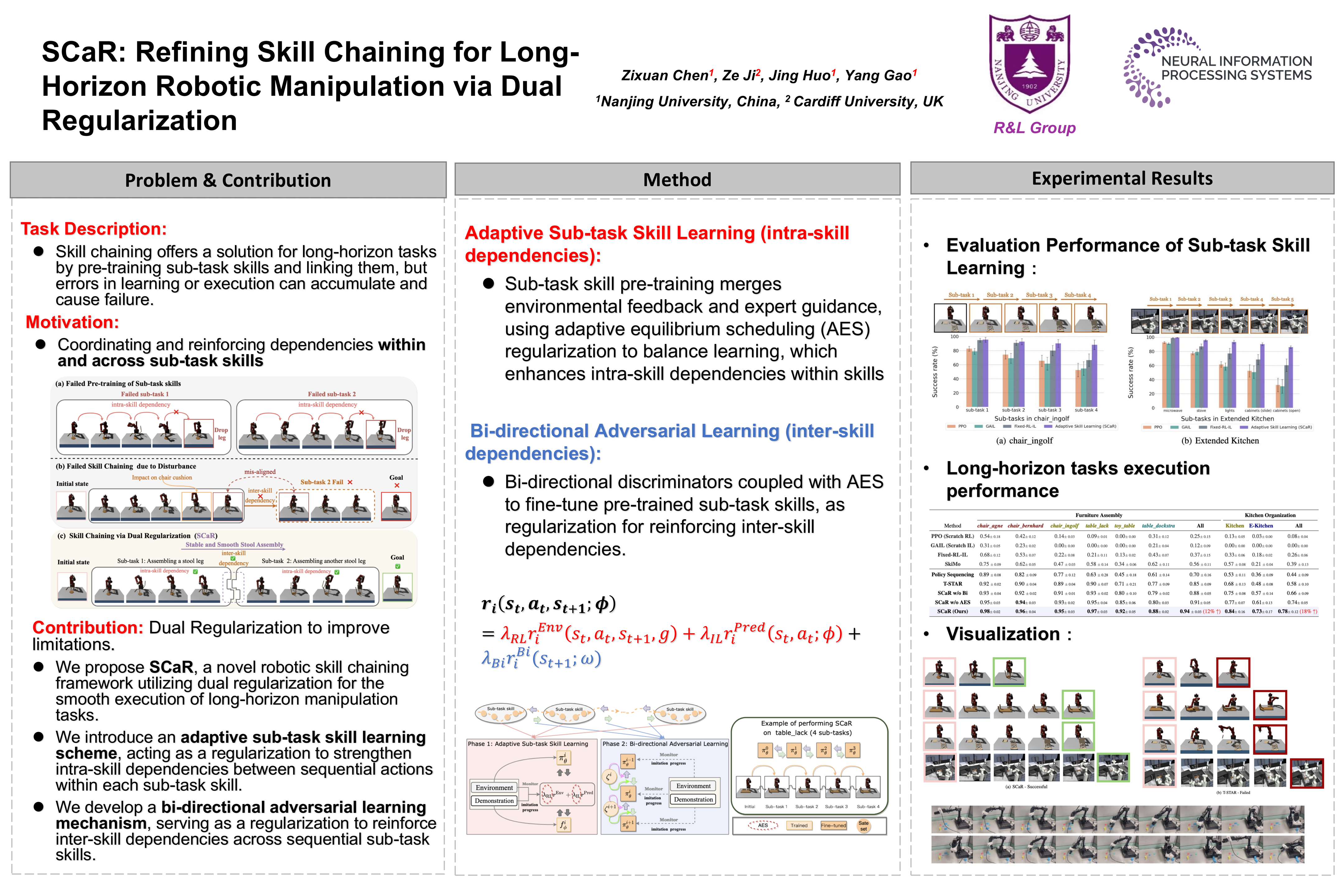
Long-horizon robotic manipulation tasks typically involve a series of interrelated sub-tasks spanning multiple execution stages. Skill chaining offers a feasible solution for these tasks by pre-training the skills for each sub-task and linking them sequentially. However, imperfections in skill learning or disturbances during execution can lead to the accumulation of errors in skill chaining process, resulting in execution failures. In this paper, we investigate how to achieve stable and smooth skill chaining for long-horizon robotic manipulation tasks. Specifically, we propose a novel skill chaining framework called Skill Chaining via Dual Regularization (SCaR). This framework applies dual regularization to sub-task skill pre-training and fine-tuning, which not only enhances the intra-skill dependencies within each sub-task skill but also reinforces the inter-skill dependencies between sequential sub-task skills, thus ensuring smooth skill chaining and stable long-horizon execution. We evaluate the SCaR framework on two representative long-horizon robotic manipulation simulation benchmarks: IKEA furniture assembly and kitchen organization. Additionally, we conduct a simple real-world validation in tabletop robot pick-and-place tasks. The experimental results show that, with the support of SCaR, the robot achieves a higher success rate in long-horizon tasks compared to relevant baselines and demonstrates greater robustness to perturbations.