State-free Reinforcement Learning
Mingyu Chen ⋅ Aldo Pacchiano ⋅ Xuezhou Zhang
2024 Poster
{kind=link}
Abstract
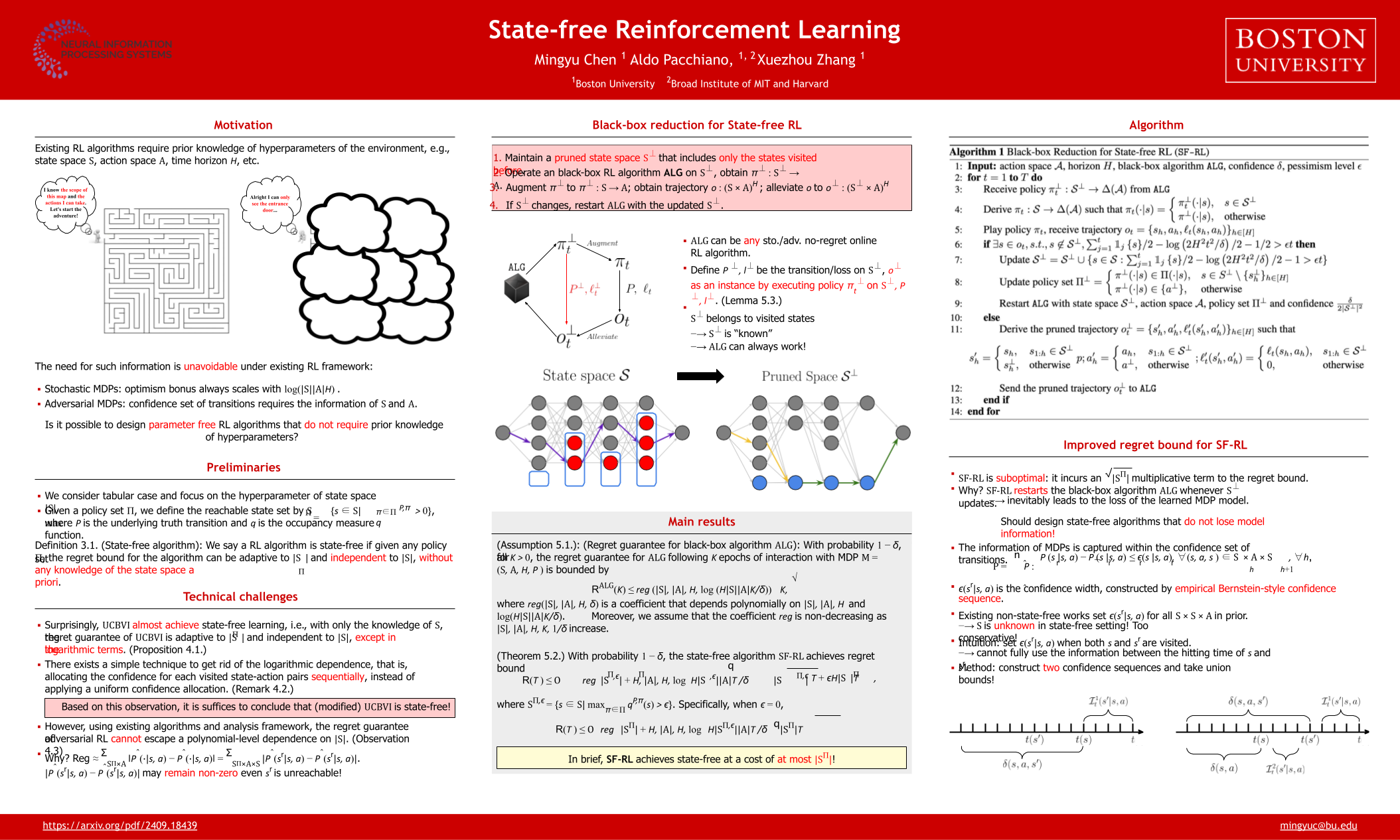
In this work, we study the \textit{state-free RL} problem, where the algorithm does not have the states information before interacting with the environment. Specifically, denote the reachable state set by $\mathcal{S}^\Pi := \{ s|\max_{\pi\in \Pi}q^{P, \pi}(s)>0 \}$, we design an algorithm which requires no information on the state space $S$ while having a regret that is completely independent of $\mathcal{S}$ and only depend on $\mathcal{S}^\Pi$. We view this as a concrete first step towards \textit{parameter-free RL}, with the goal of designing RL algorithms that require no hyper-parameter tuning.
Video
Chat is not available.
Successful Page Load