A Simple yet Universal Framework for Depth Completion
{kind=link}
Abstract
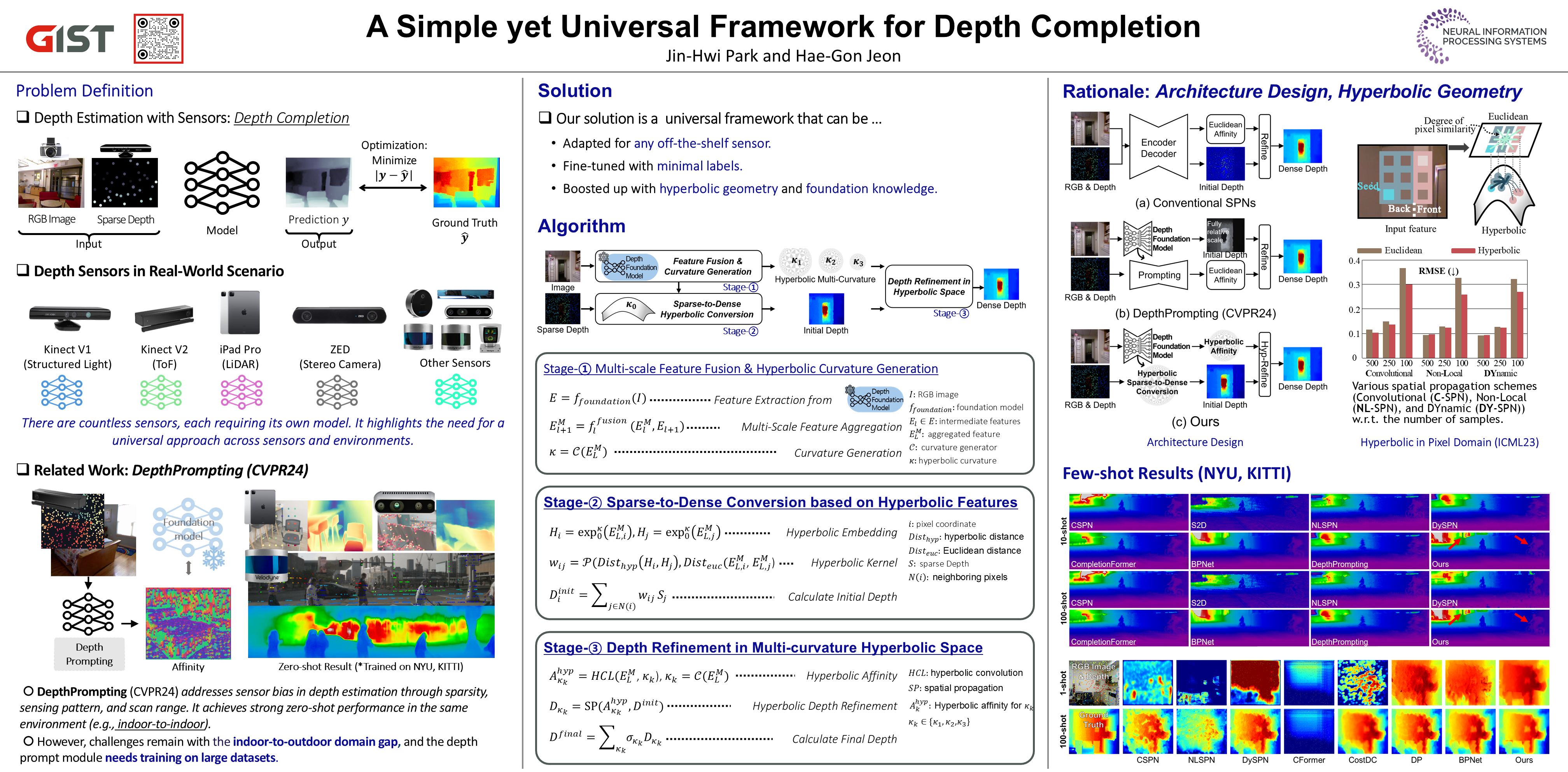
Consistent depth estimation across diverse scenes and sensors is a crucial challenge in computer vision, especially when deploying machine learning models in the real world. Traditional methods depend heavily on extensive pixel-wise labeled data, which is costly and labor-intensive to acquire, and frequently have difficulty in scale issues on various depth sensors. In response, we define Universal Depth Completion (UniDC) problem. We also present a baseline architecture, a simple yet effective approach tailored to estimate scene depth across a wide range of sensors and environments using minimal labeled data. Our approach addresses two primary challenges: generalizable knowledge of unseen scene configurations and strong adaptation to arbitrary depth sensors with various specifications. To enhance versatility in the wild, we utilize a foundation model for monocular depth estimation that provides a comprehensive understanding of 3D structures in scenes. Additionally, for fast adaptation to off-the-shelf sensors, we generate a pixel-wise affinity map based on the knowledge from the foundation model. We then adjust depth information from arbitrary sensors to the monocular depth along with the constructed affinity. Furthermore, to boost up both the adaptability and generality, we embed the learned features into hyperbolic space, which builds implicit hierarchical structures of 3D data from fewer examples. Extensive experiments demonstrate the proposed method's superior generalization capabilities for UniDC problem over state-of-the-art depth completion. Source code is publicly available at https://github.com/JinhwiPark/UniDC.