Towards Learning Group-Equivariant Features for Domain Adaptive 3D Detection
Sangyun Shin ⋅ Yuhang He ⋅ Madhu Vankadari ⋅ Ta-Ying Cheng ⋅ Qian Xie ⋅ Andrew Markham ⋅ Niki Trigoni
2024 Poster
{kind=link}
Abstract
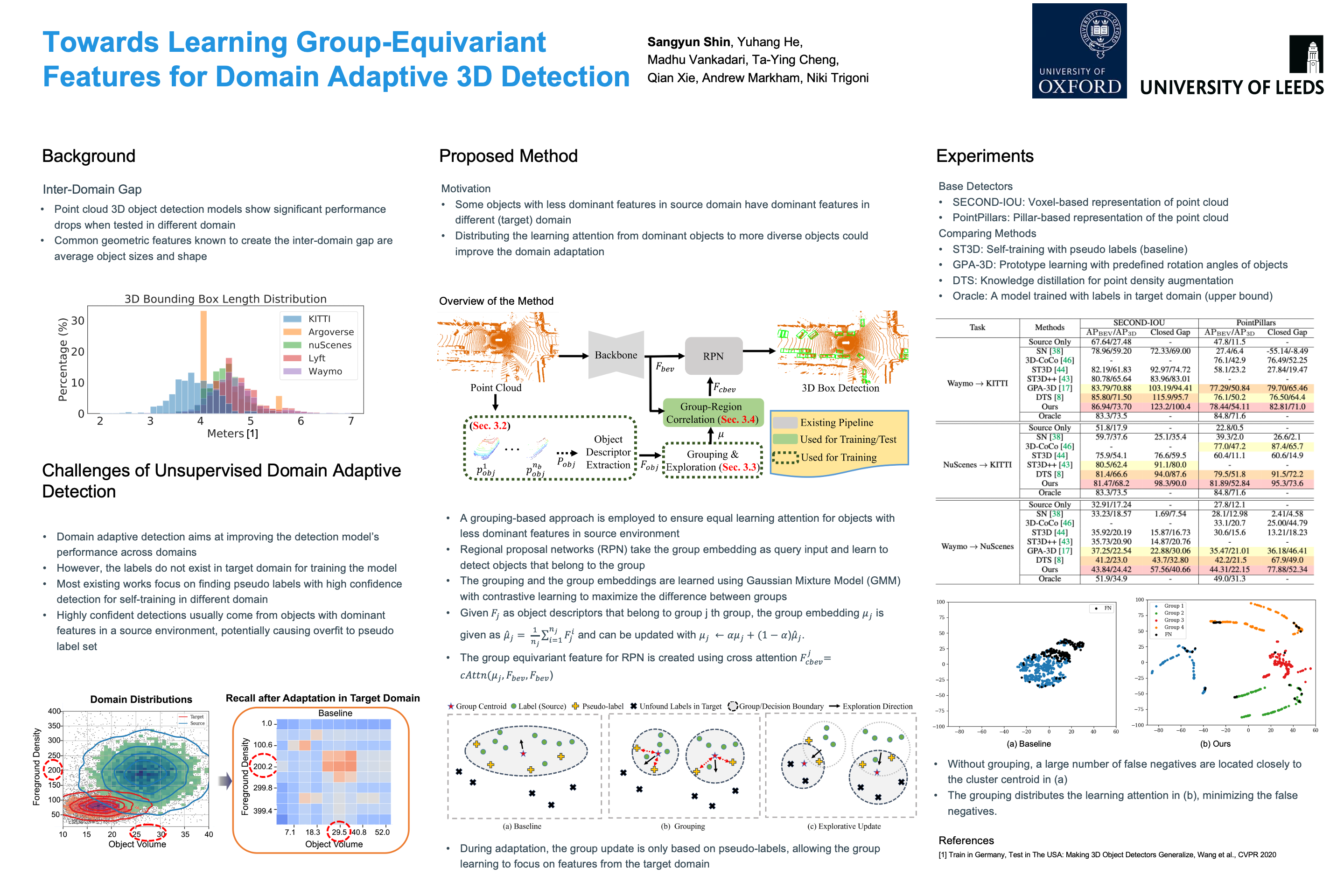
The performance of 3D object detection in large outdoor point clouds deteriorates significantly in an unseen environment due to the inter-domain gap. To address these challenges, most existing methods for domain adaptation harness self-training schemes and attempt to bridge the gap by focusing on a single factor that causes the inter-domain gap, such as objects' sizes, shapes, and foreground density variation. However, the resulting adaptations suggest that there is still a substantial inter-domain gap left to be minimized. We argue that this is due to two limitations: 1) Biased pseudo-label collection from self-training. 2) Multiple factors jointly contributing to how the object is perceived in the unseen target domain. In this work, we propose a grouping-exploration strategy framework, Group Explorer Domain Adaptation ($\textbf{GroupEXP-DA}$), to addresses those two issues. Specifically, our grouping divides the available label sets into multiple clusters and ensures all of them have equal learning attention with the group-equivariant spatial feature, avoiding dominant types of objects causing imbalance problems. Moreover, grouping learns to divide objects by considering inherent factors in a data-driven manner, without considering each factor separately as existing works. On top of the group-equivariant spatial feature that selectively detects objects similar to the input group, we additionally introduce an explorative group update strategy that reduces the false negative detection in the target domain, further reducing the inter-domain gap. During inference, only the learned group features are necessary for making the group-equivariant spatial feature, placing our method as a simple add-on that can be applicable to most existing detectors. We show how each module contributes to substantially bridging the inter-domain gaps compared to existing works across large urban outdoor datasets such as NuScenes, Waymo, and KITTI.
Video
Chat is not available.
Successful Page Load