Towards the Transferability of Rewards Recovered via Regularized Inverse Reinforcement Learning
{kind=link}
Abstract
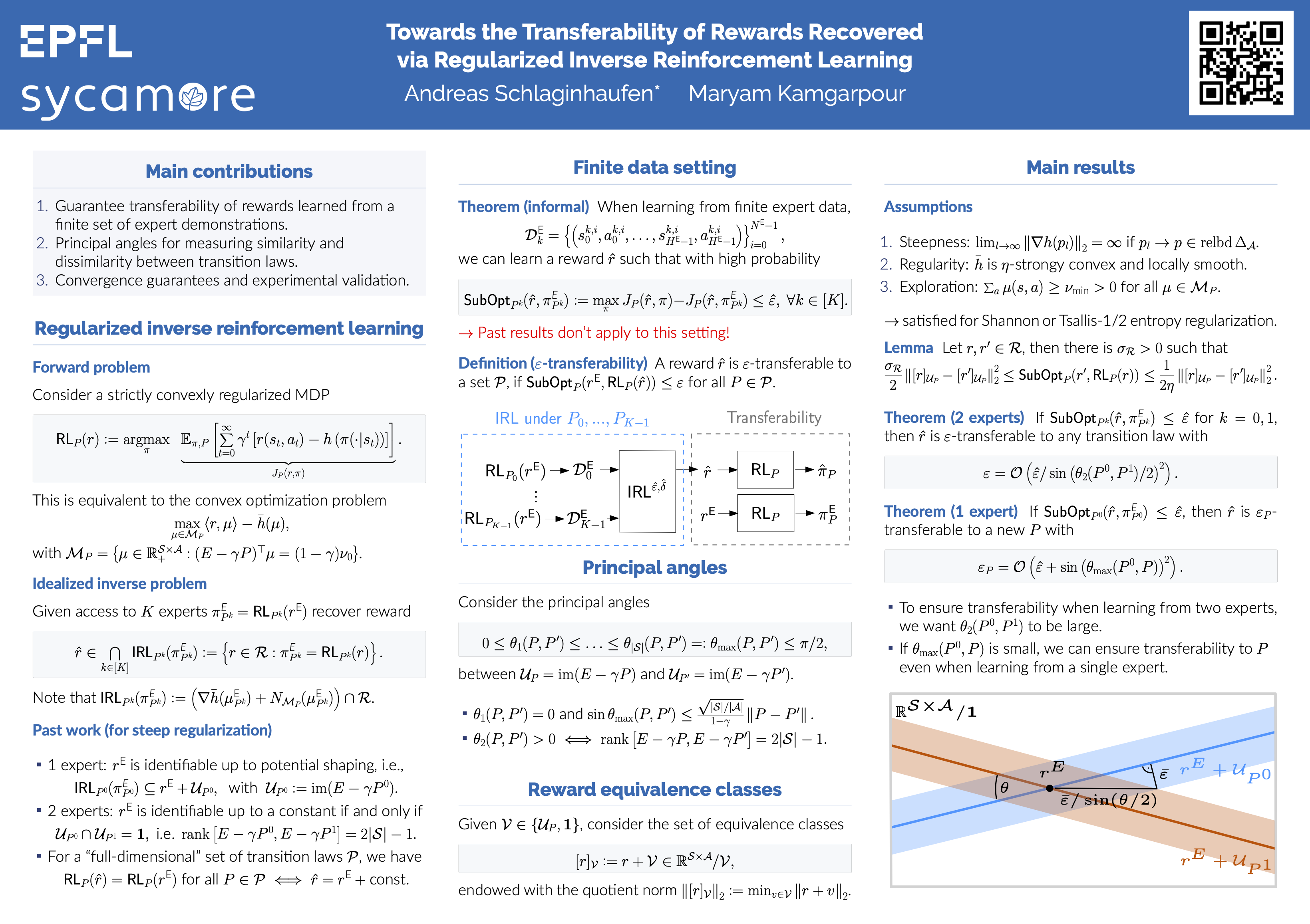
Inverse reinforcement learning (IRL) aims to infer a reward from expert demonstrations, motivated by the idea that the reward, rather than the policy, is the most succinct and transferable description of a task [Ng et al., 2000]. However, the reward corresponding to an optimal policy is not unique, making it unclear if an IRL-learned reward is transferable to new transition laws in the sense that its optimal policy aligns with the optimal policy corresponding to the expert's true reward. Past work has addressed this problem only under the assumption of full access to the expert's policy, guaranteeing transferability when learning from two experts with the same reward but different transition laws that satisfy a specific rank condition [Rolland et al., 2022]. In this work, we show that the conditions developed under full access to the expert's policy cannot guarantee transferability in the more practical scenario where we have access only to demonstrations of the expert. Instead of a binary rank condition, we propose principal angles as a more refined measure of similarity and dissimilarity between transition laws. Based on this, we then establish two key results: 1) a sufficient condition for transferability to any transition laws when learning from at least two experts with sufficiently different transition laws, and 2) a sufficient condition for transferability to local changes in the transition law when learning from a single expert. Furthermore, we also provide a probably approximately correct (PAC) algorithm and an end-to-end analysis for learning transferable rewards from demonstrations of multiple experts.