Identification of Analytic Nonlinear Dynamical Systems with Non-asymptotic Guarantees
{kind=link}
Abstract
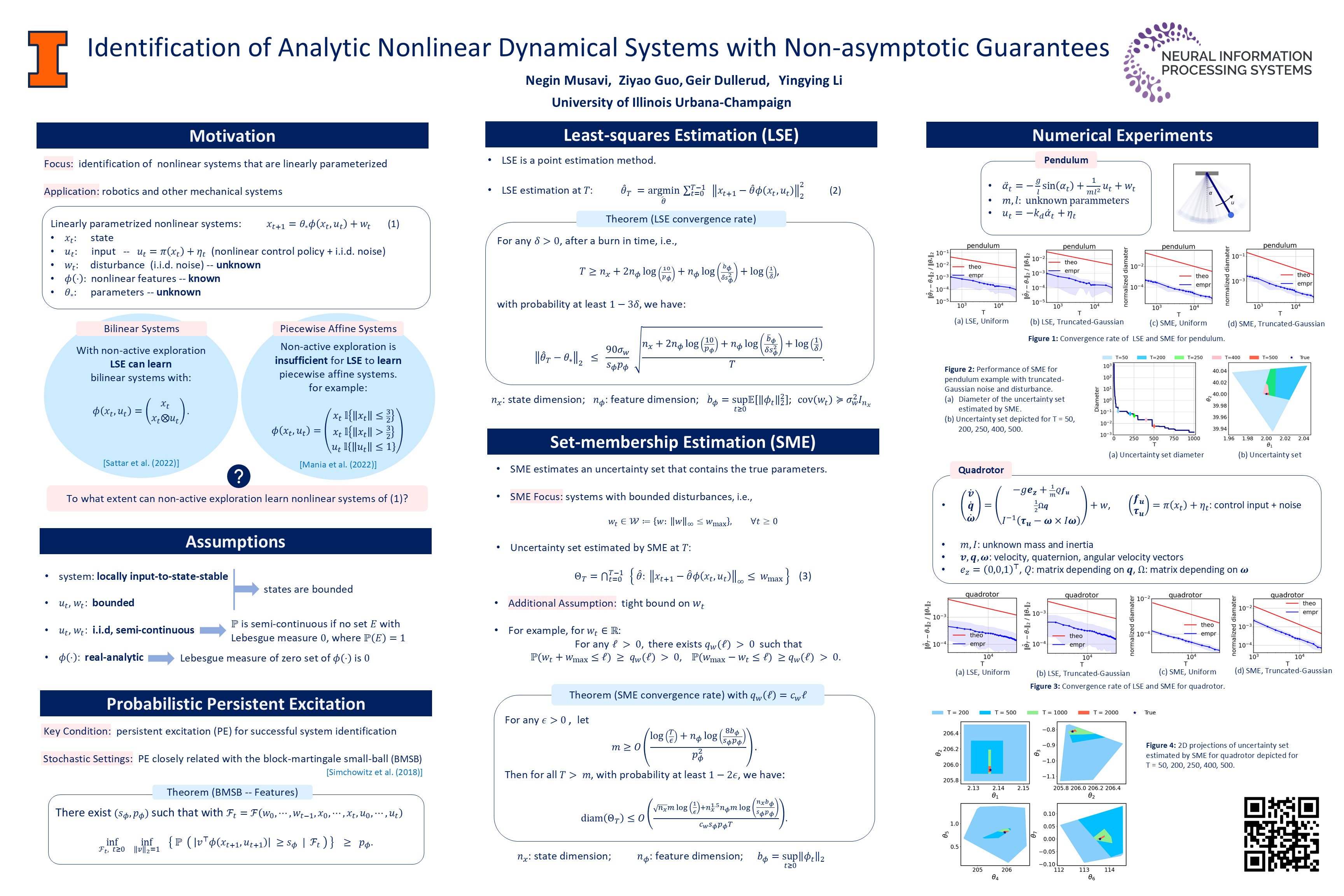
This paper focuses on the system identification of an important class of nonlinear systems: nonlinear systems that are linearly parameterized, which enjoy wide applications in robotics and other mechanical systems. We consider two system identification methods: least-squares estimation (LSE), which is a point estimation method; and set-membership estimation (SME), which estimates an uncertainty set that contains the true parameters. We provide non-asymptotic convergence rates for LSE and SME under i.i.d. control inputs and control policies with i.i.d. random perturbations, both of which are considered as non-active-exploration inputs. Compared with the counter-example based on piecewise-affine systems in the literature, the success of non-active exploration in our setting relies on a key assumption about the system dynamics: we require the system functions to be real-analytic. Our results, together with the piecewise-affine counter-example, reveal the importance of differentiability in nonlinear system identification through non-active exploration. Lastly, we numerically compare our theoretical bounds with the empirical performance of LSE and SME on a pendulum example and a quadrotor example.