Risk-Driven Design of Perception Systems
{kind=link}
Abstract
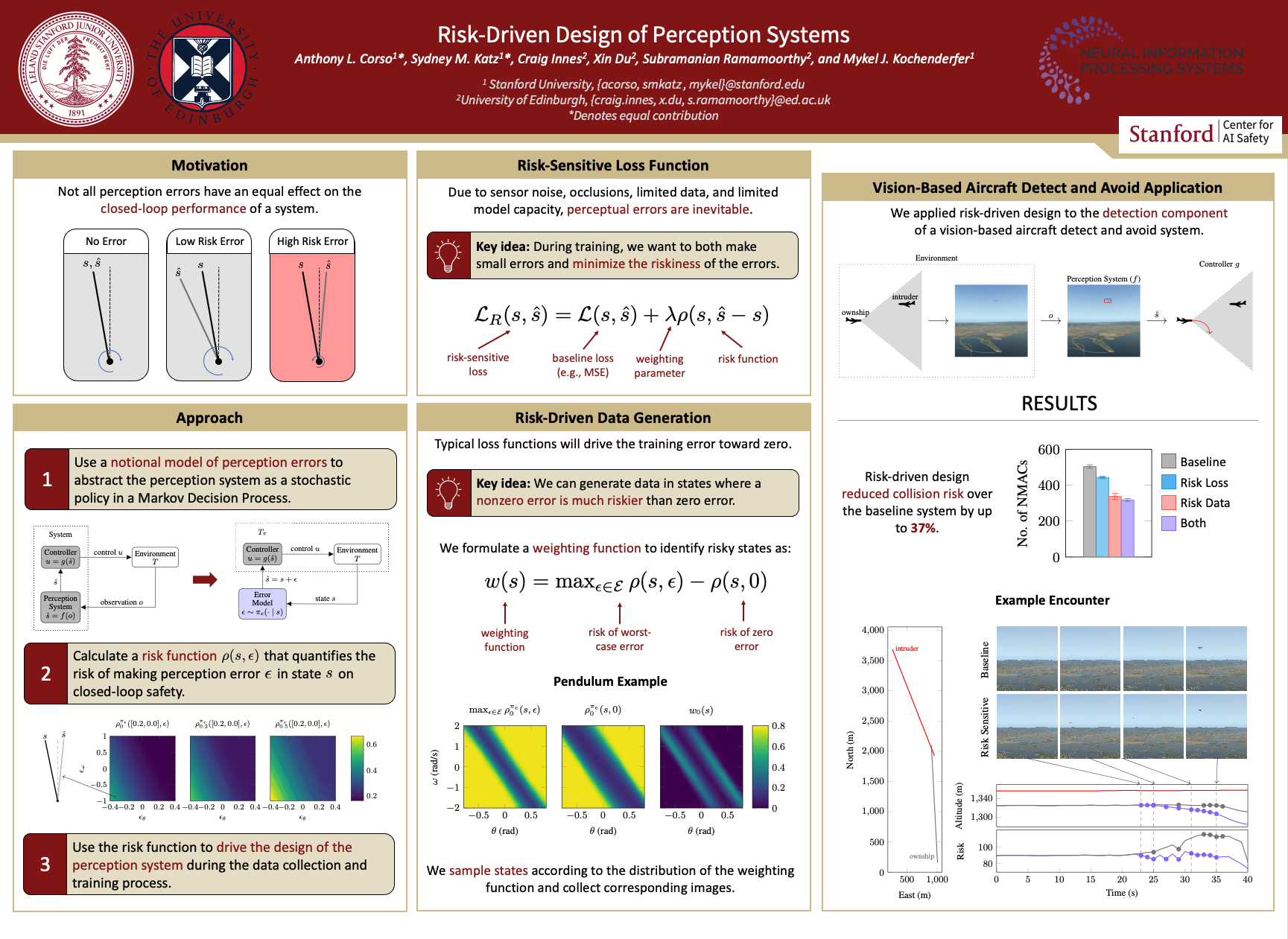
Modern autonomous systems rely on perception modules to process complex sensor measurements into state estimates. These estimates are then passed to a controller, which uses them to make safety-critical decisions. It is therefore important that we design perception systems to minimize errors that reduce the overall safety of the system. We develop a risk-driven approach to designing perception systems that accounts for the effect of perceptual errors on the performance of the fully-integrated, closed-loop system. We formulate a risk function to quantify the effect of a given perceptual error on overall safety, and show how we can use it to design safer perception systems by including a risk-dependent term in the loss function and generating training data in risk-sensitive regions. We evaluate our techniques on a realistic vision-based aircraft detect and avoid application and show that risk-driven design reduces collision risk by 37% over a baseline system.