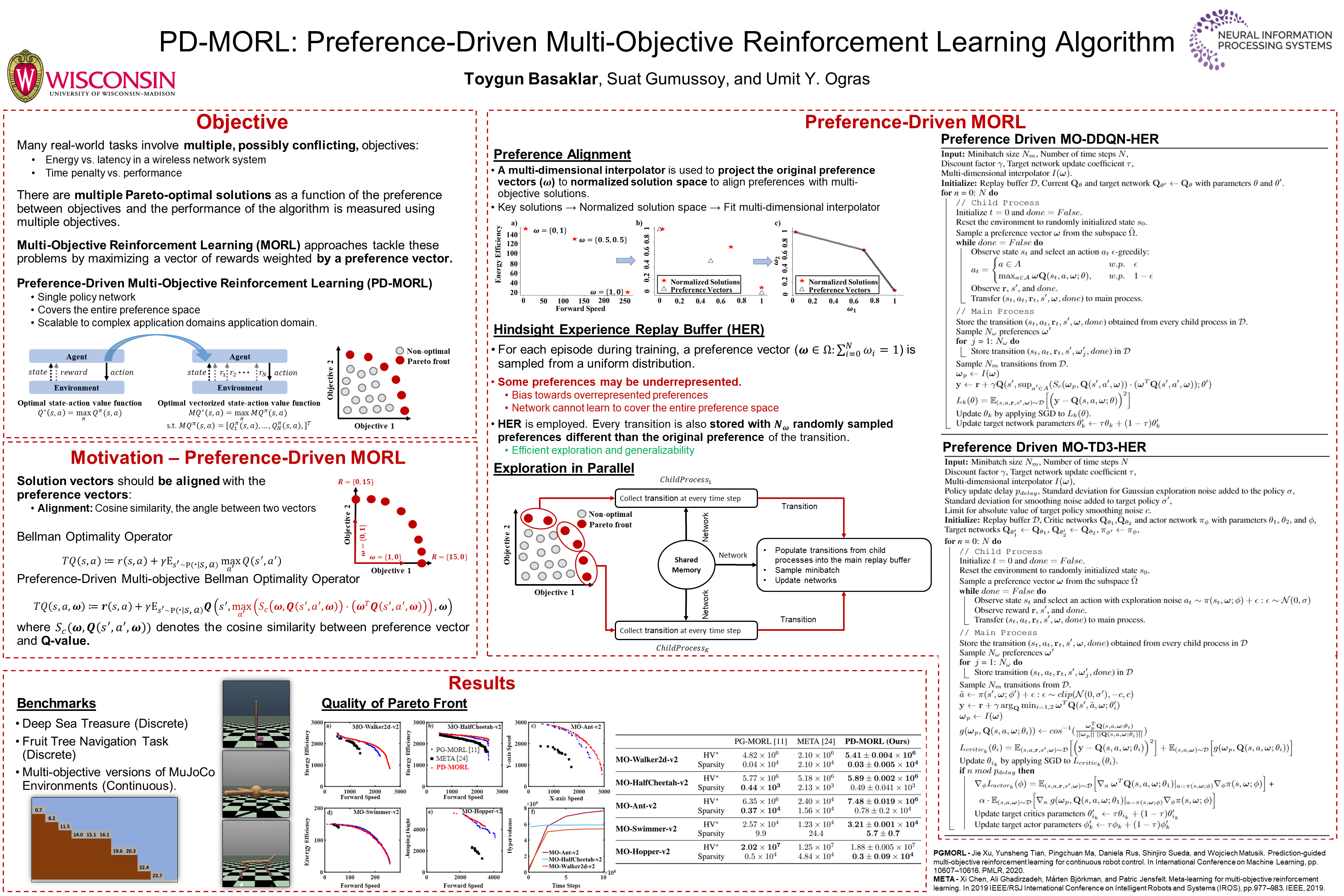
PD-MORL: Preference-Driven Multi-Objective Reinforcement Learning Algorithm
Toygun Basaklar ⋅ Suat Gumussoy ⋅ Umit Ogras
{kind=link}
Abstract
Multi-objective reinforcement learning (MORL) approaches have emerged to tackle many real-world problems with multiple conflicting objectives by maximizing a joint objective function weighted by a preference vector. These approaches find fixed customized policies corresponding to preference vectors specified during training. However, the design constraints and objectives typically change dynamically in real-life scenarios. Furthermore, storing a policy for each potential preference is not scalable. Hence, obtaining a set of Pareto front solutions for the entire preference space in a given domain with a single training is critical. To this end, we propose a novel MORL algorithm that trains a single universal network to cover the entire preference space scalable to continuous robotic tasks. The proposed approach, Preference-Driven MORL (PD-MORL), utilizes the preferences as guidance to update the network parameters. It also employs a novel parallelization approach to increase sample efficiency. We show that PD-MORL achieves up to $25\%$ larger hypervolume for challenging continuous control tasks compared to prior approaches using an order of magnitude fewer trainable parameters while achieving broad and dense Pareto front solutions.
Video
Chat is not available.
Successful Page Load