SoftTreeMax: Policy Gradient with Tree Search
{kind=link}
Abstract
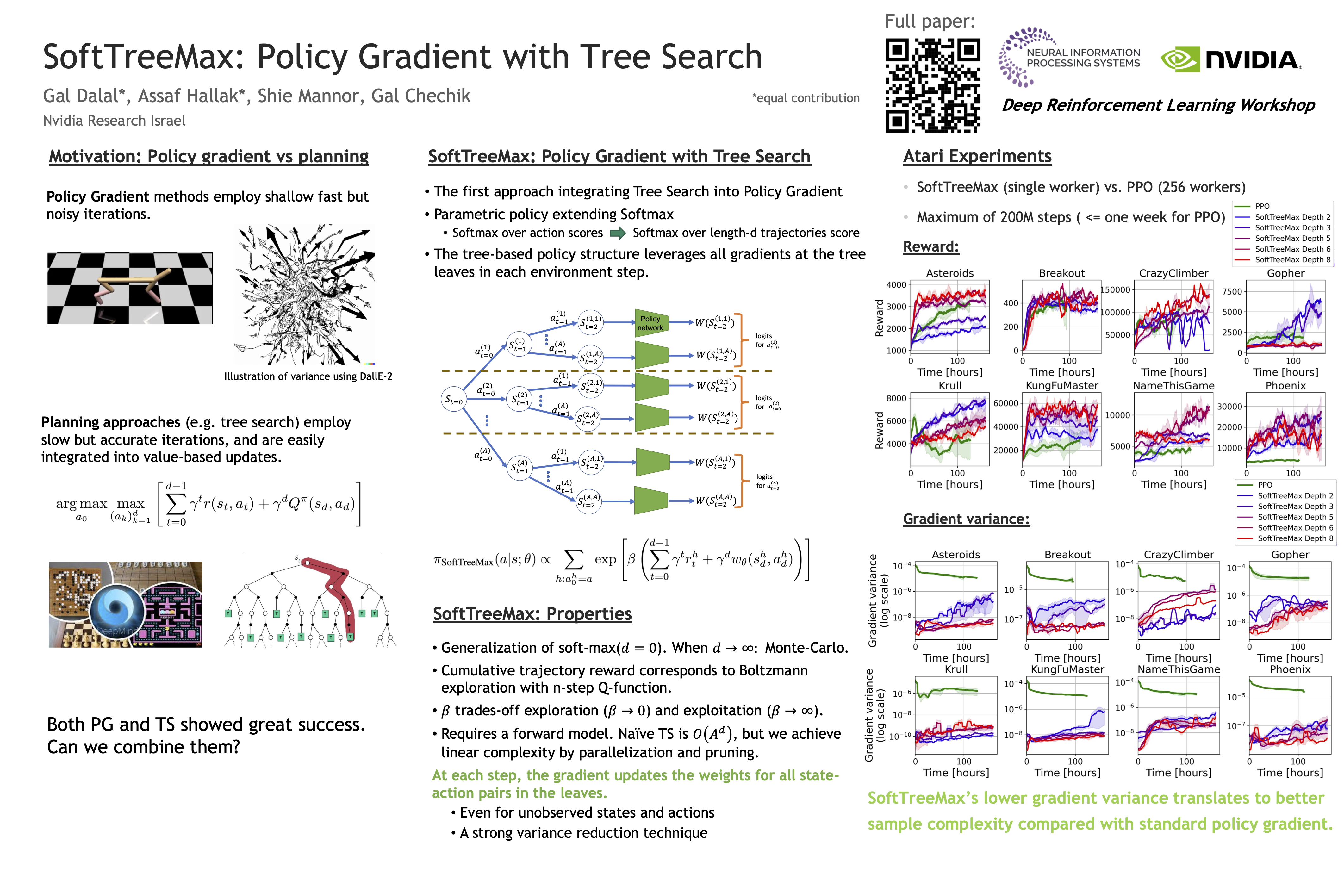
Policy-gradient methods are widely used for learning control policies. They can be easily distributed to multiple workers and reach state-of-the-art results in many domains. Unfortunately, they exhibit large variance and subsequently suffer from high-sample complexity since they aggregate gradients over entire trajectories. At the other extreme, planning methods, like tree search, optimize the policy using single-step transitions that consider future lookahead. These approaches have been mainly considered for value-based algorithms. Planning-based algorithms require a forward model and are computationally intensive at each step, but are more sample efficient. In this work, we introduce SoftTreeMax, the first approach that integrates tree-search into policy gradient. Traditionally, gradients are computed for single state-action pairs. Instead, our tree-based policy structure leverages all gradients at the tree leaves in each environment step. This allows us to reduce the variance of gradients by three orders of magnitude and to benefit from better sample complexity compared with standard policy gradient. On Atari, SoftTreeMax demonstrates up to 5x better performance in faster run-time compared with distributed PPO.