Skill Machines: Temporal Logic Composition in Reinforcement Learning
{kind=link}
Abstract
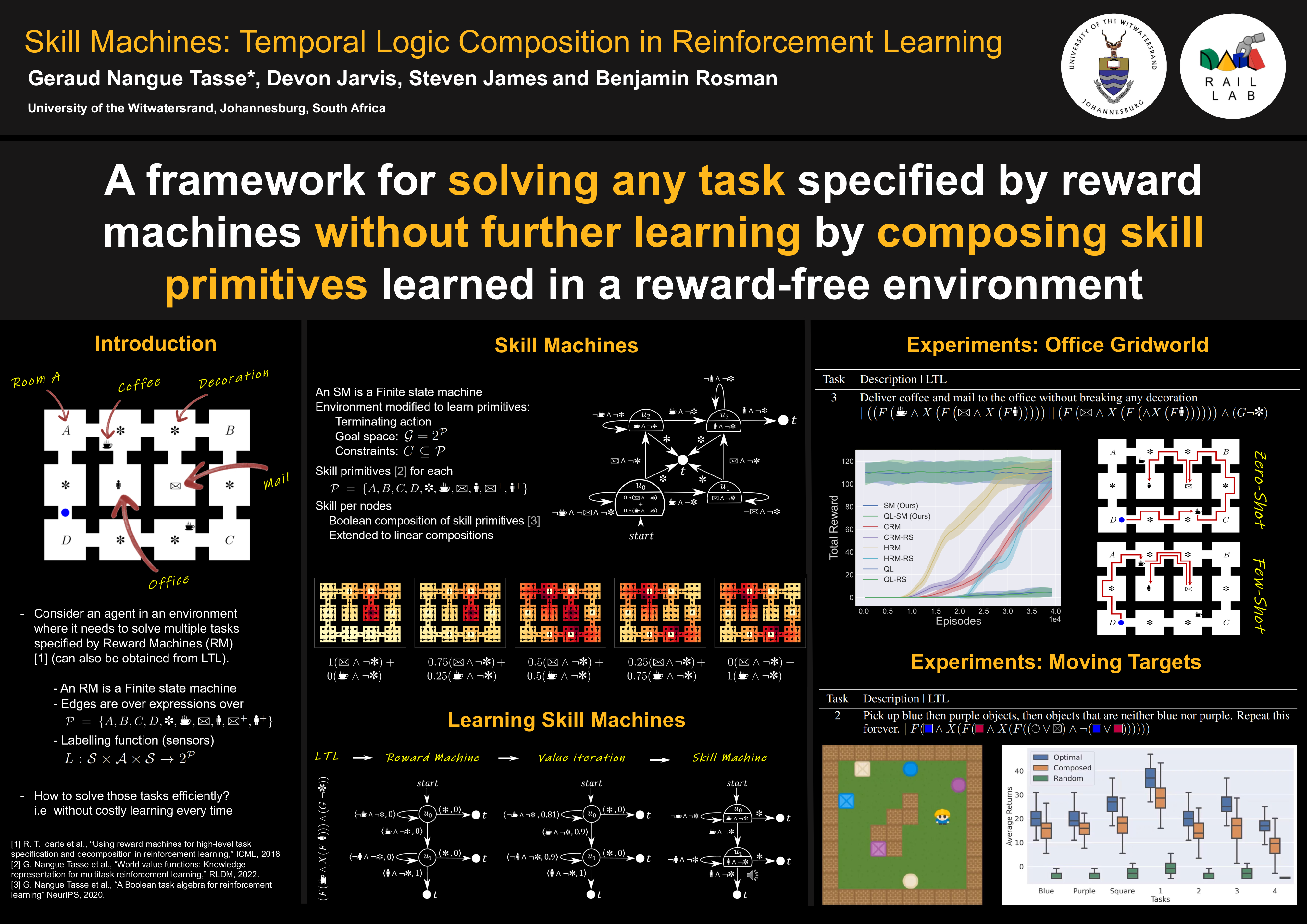
A major challenge in reinforcement learning is specifying tasks in a manner that is both interpretable and verifiable. One common approach is to specify tasks through reward machines---finite state machines that encode the task to be solved. We introduce skill machines, a representation that can be learned directly from these reward machines that encode the solution to such tasks. We propose a framework where an agent first learns a set of base skills in a reward-free setting, and then combines these skills with the learned skill machine to produce composite behaviours specified by any regular language, such as linear temporal logics. This provides the agent with the ability to map from complex logical task specifications to near-optimal behaviours zero-shot. We demonstrate our approach in both a tabular and high-dimensional video game environment, where an agent is faced with several of these complex, long-horizon tasks. Our results indicate that the agent is capable of satisfying extremely complex task specifications, producing near optimal performance with no further learning. Finally, we demonstrate that the performance of skill machines can be improved with regular off-policy reinforcement learning algorithms when optimal behaviours are desired.