Fine-tuning Offline Policies with Optimistic Action Selection
{kind=link}
Abstract
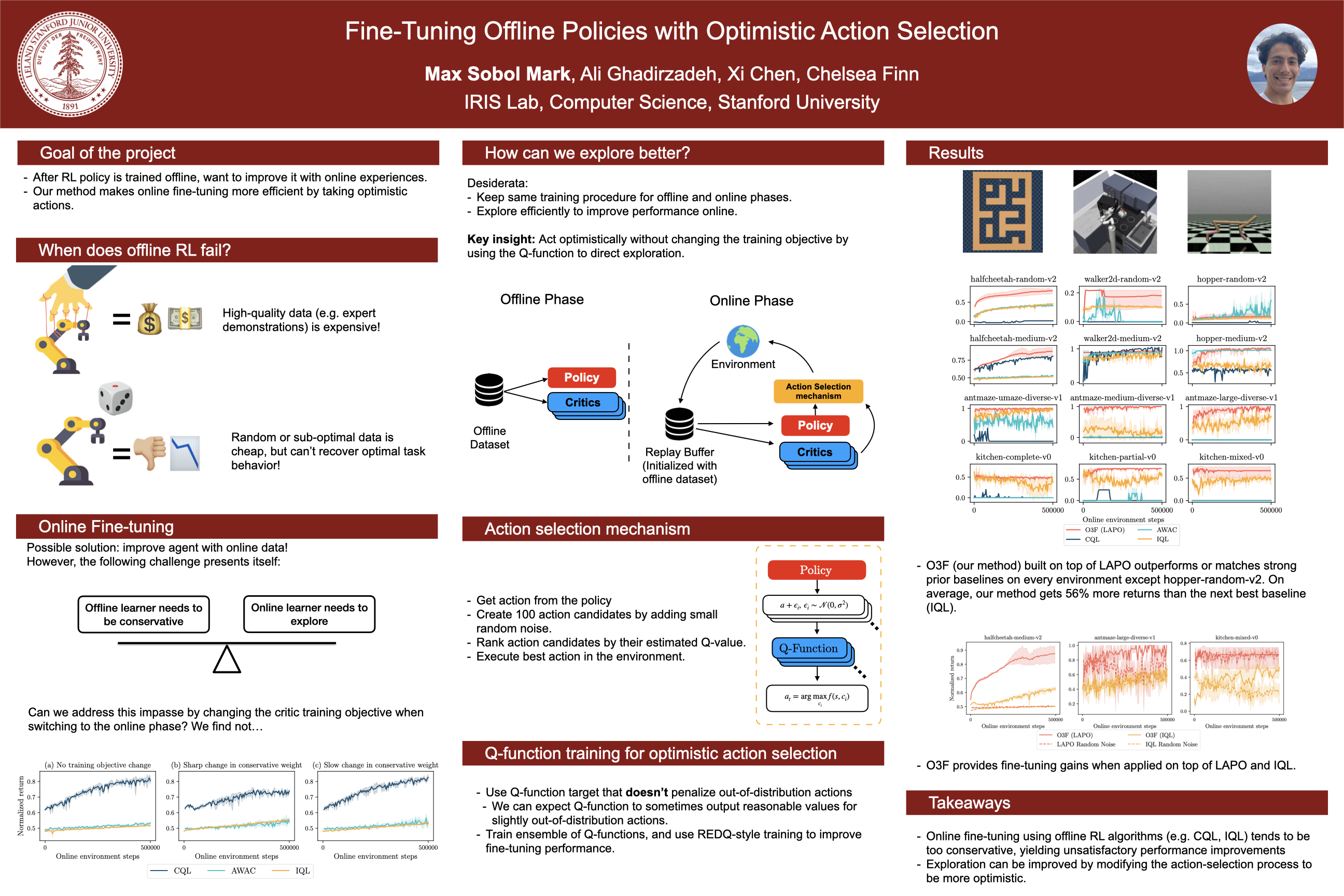
Offline reinforcement learning algorithms can train performant policies for hard tasks using previously-collected datasets. However, the quality of the offline dataset often limits the levels of performance possible. We consider the problem of improving offline policies through online fine-tuning. Offline RL requires a pessimistic training objective to mitigate distributional shift between the trained policy and the offline behavior policy, which will make the trained policy averse to picking novel actions. In contrast, online RL requires exploration, or optimism. Thus, fine-tuning online policies with the offline training objective is not ideal. Additionally, loosening the fine-tuning objective to allow for more exploration can potentially destroy the behaviors learned in the offline phase because of the sudden and significant change in the optimization objective. To mitigate this challenge, we propose a method to facilitate exploration during online fine-tuning that maintains the same training objective throughout both offline and online phases, while encouraging exploration. We accomplish this by changing the action-selection method to be more optimistic with respect to the Q-function. By choosing to take actions in the environment with higher expected Q-values, our method is able to explore and improve behaviors more efficiently, obtaining 56% more returns on average than the alternative approaches on several locomotion, navigation, and manipulation tasks.