{kind=link}
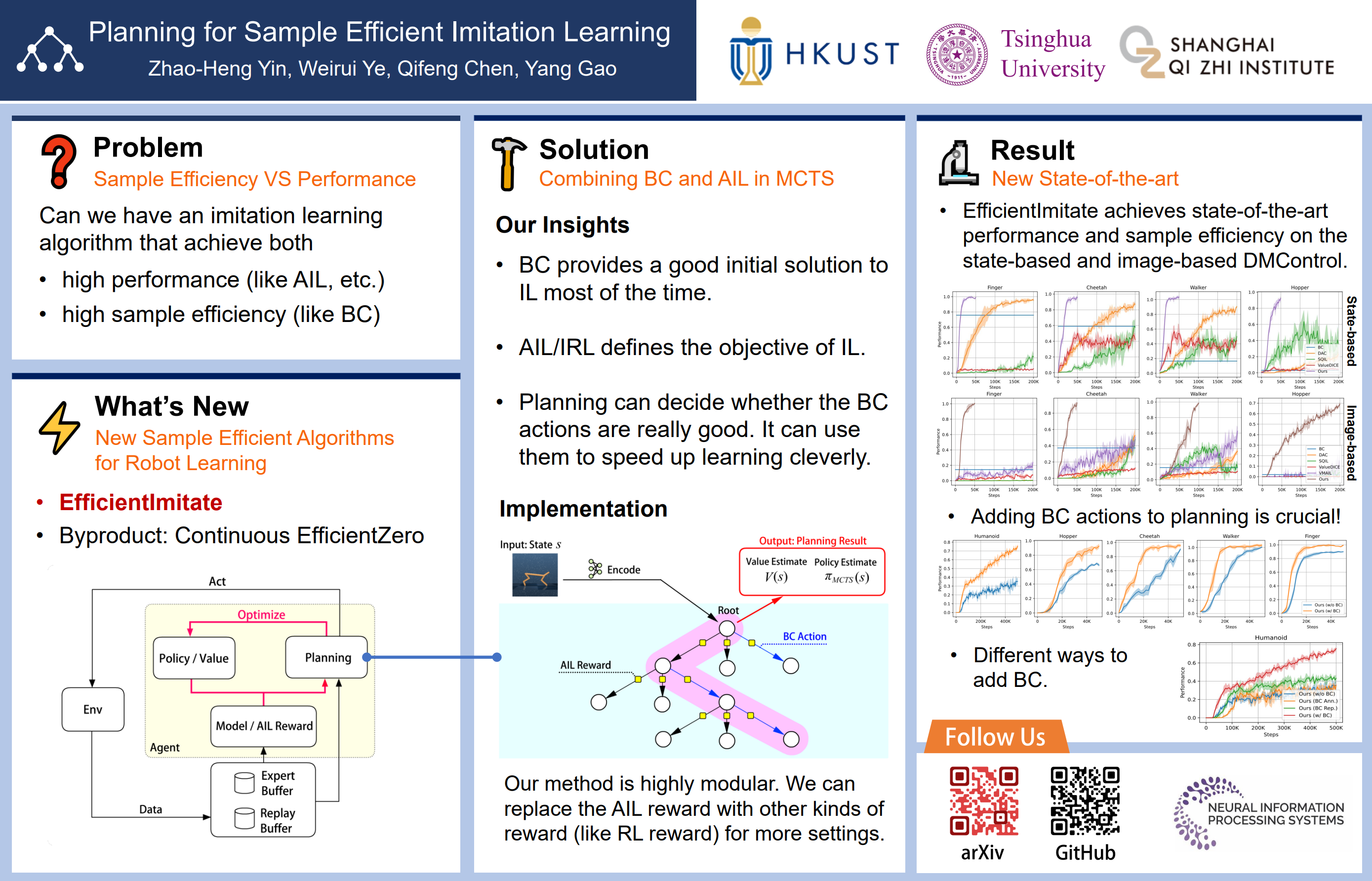
Imitation learning is a class of promising policy learning algorithms that is free from many practical issues with reinforcement learning, such as the reward design issue and the exploration hardness. However, the current imitation algorithm struggles to achieve both high performance and high in-environment sample efficiency simultaneously. Behavioral Cloning (BC) does not need in-environment interactions, but it suffers from the covariate shift problem which harms its performance. Adversarial Imitation Learning (AIL) turns imitation learning into a distribution matching problem. It can achieve better performance on some tasks but it requires a large number of in-environment interactions. Inspired by the recent success of EfficientZero in RL, we propose EfficientImitate (EI), a planning-based imitation learning method that can achieve high in-environment sample efficiency and performance simultaneously. Our algorithmic contribution in this paper is two-fold. First, we extend AIL into the MCTS-based RL. Second, we show the seemingly incompatible two classes of imitation algorithms (BC and AIL) can be naturally unified under our framework, enjoying the benefits of both. We benchmark our method not only on the state-based DeepMind Control Suite but also on the image version which many previous works find highly challenging. Experimental results show that EI achieves state-of-the-art results in performance and sample efficiency. EI shows over 4x gain in performance in the limited sample setting on state-based and image-based tasks and can solve challenging problems like Humanoid, where previous methods fail with a small amount of interactions. Our code is available at https://github.com/zhaohengyin/EfficientImitate.