{kind=link}
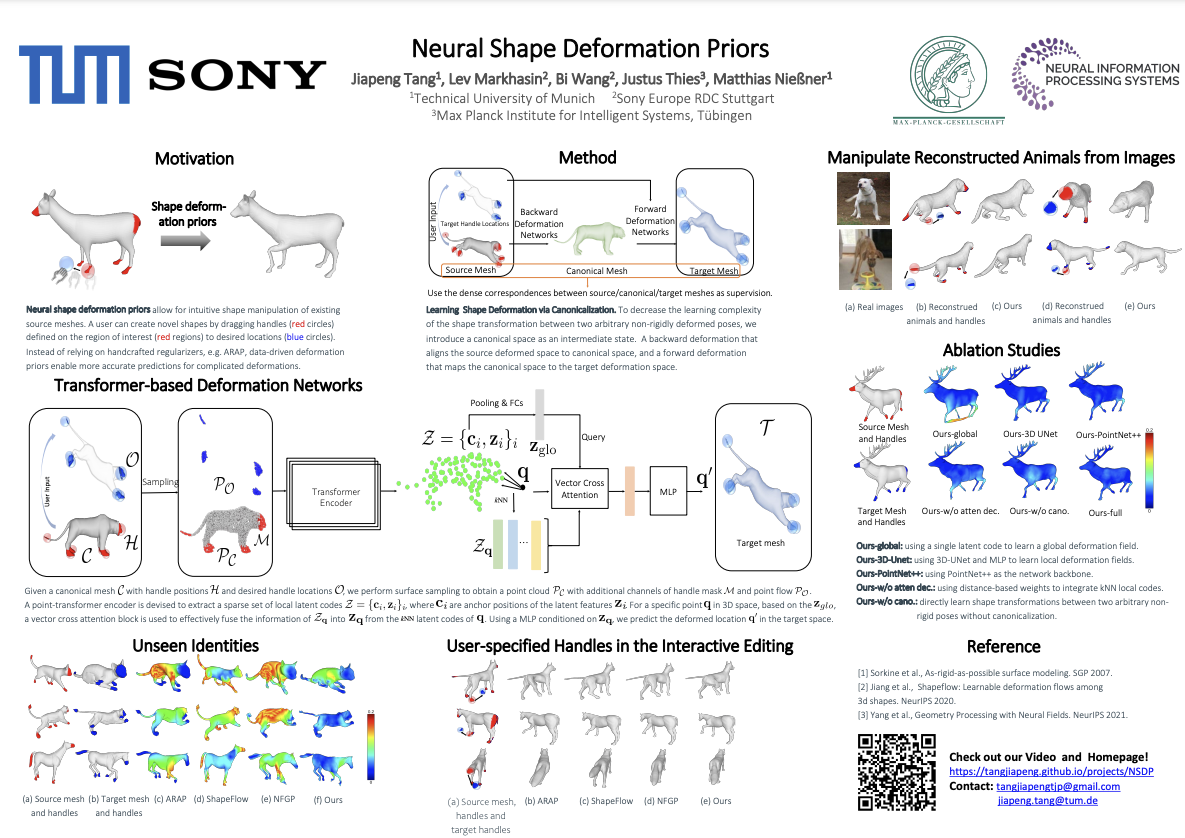
We present Neural Shape Deformation Priors, a novel method for shape manipulation that predicts mesh deformations of non-rigid objects from user-provided handle movements. State-of-the-art methods cast this problem as an optimization task, where the input source mesh is iteratively deformed to minimize an objective function according to hand-crafted regularizers such as ARAP. In this work, we learn the deformation behavior based on the underlying geometric properties of a shape, while leveraging a large-scale dataset containing a diverse set of non-rigid deformations. Specifically, given a source mesh and desired target locations of handles that describe the partial surface deformation, we predict a continuous deformation field that is defined in 3D space to describe the space deformation. To this end, we introduce transformer-based deformation networks that represent a shape deformation as a composition of local surface deformations. It learns a set of local latent codes anchored in 3D space, from which we can learn a set of continuous deformation functions for local surfaces. Our method can be applied to challenging deformations and generalizes well to unseen deformations. We validate our approach in experiments using the DeformingThing4D dataset, and compare to both classic optimization-based and recent neural network-based methods.