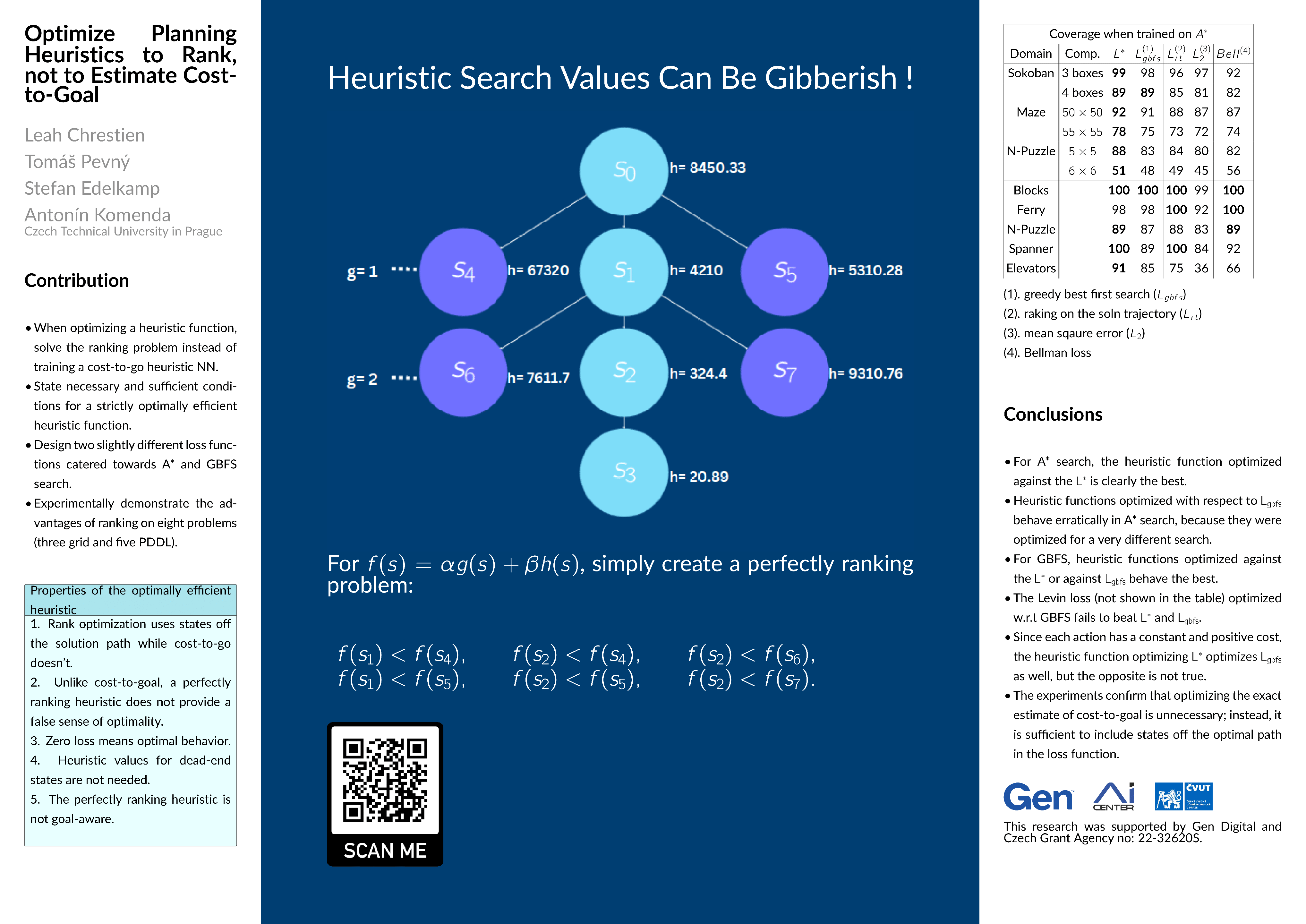
Optimize Planning Heuristics to Rank, not to Estimate Cost-to-Goal
Leah Chrestien ⋅ Stefan Edelkamp ⋅ Antonin Komenda ⋅ Tomas Pevny
2023 Poster
{kind=link}
Abstract
In imitation learning for planning, parameters of heuristic functions are optimized against a set of solved problem instances. This work revisits the necessary and sufficient conditions of strictly optimally efficient heuristics for forward search algorithms, mainly A* and greedy best-first search, which expand only states on the returned optimal path. It then proposes a family of loss functions based on ranking tailored for a given variant of the forward search algorithm. Furthermore, from a learning theory point of view, it discusses why optimizing cost-to-goal h* is unnecessarily difficult. The experimental comparison on a diverse set of problems unequivocally supports the derived theory.
Video
Chat is not available.
Successful Page Load