NeuroGF: A Neural Representation for Fast Geodesic Distance and Path Queries
{kind=link}
Abstract
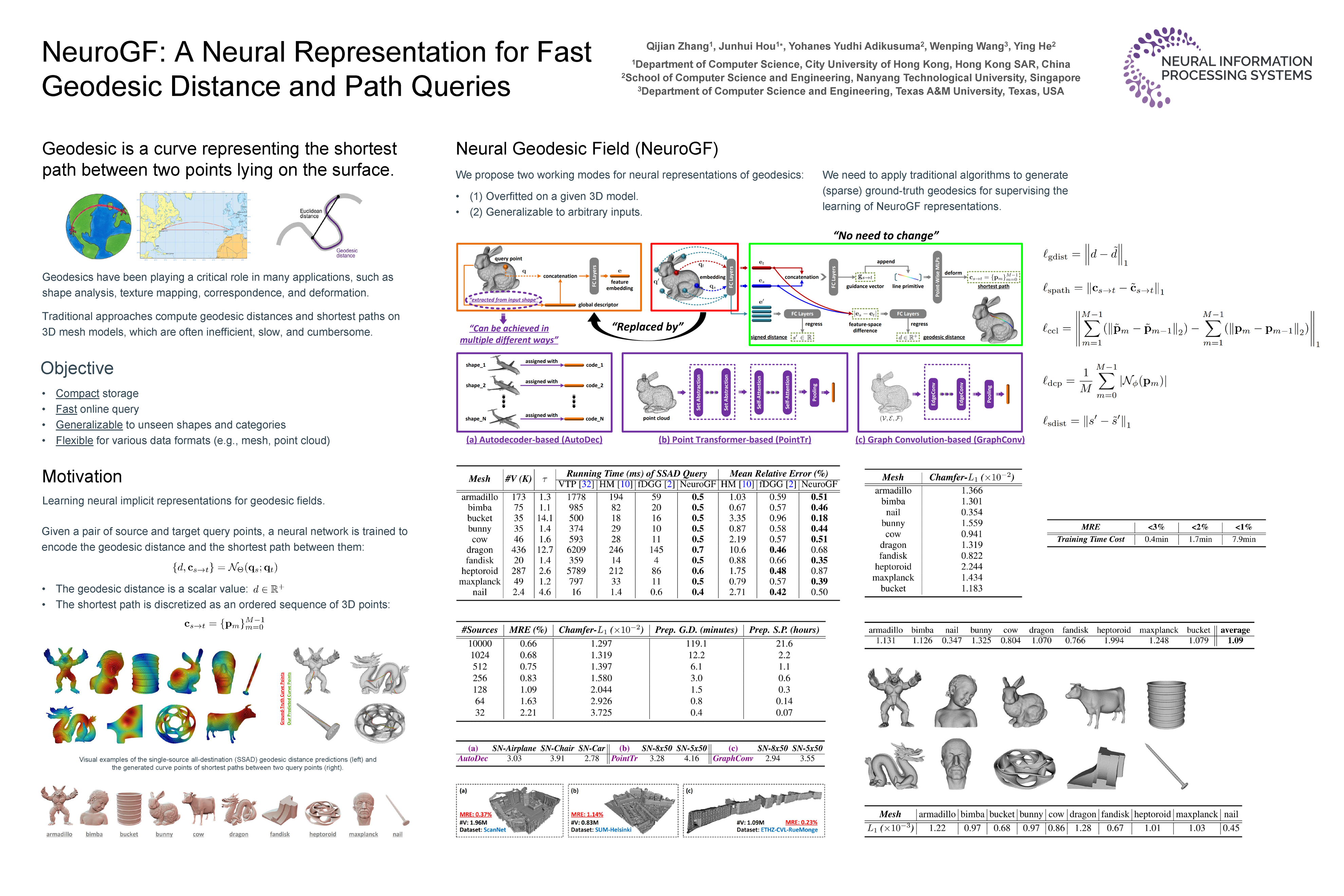
Geodesics play a critical role in many geometry processing applications. Traditional algorithms for computing geodesics on 3D mesh models are often inefficient and slow, which make them impractical for scenarios requiring extensive querying of arbitrary point-to-point geodesics. Recently, deep implicit functions have gained popularity for 3D geometry representation, yet there is still no research on neural implicit representation of geodesics. To bridge this gap, we make the first attempt to represent geodesics using implicit learning frameworks. Specifically, we propose neural geodesic field (NeuroGF), which can be learned to encode all-pairs geodesics of a given 3D mesh model, enabling to efficiently and accurately answer queries of arbitrary point-to-point geodesic distances and paths. Evaluations on common 3D object models and real-captured scene-level meshes demonstrate our exceptional performances in terms of representation accuracy and querying efficiency. Besides, NeuroGF also provides a convenient way of jointly encoding both 3D geometry and geodesics in a unified representation. Moreover, the working mode of per-model overfitting is further extended to generalizable learning frameworks that can work on various input formats such as unstructured point clouds, which also show satisfactory performances for unseen shapes and categories. Our code and data are available at https://github.com/keeganhk/NeuroGF.