Leveraging Vision-Centric Multi-Modal Expertise for 3D Object Detection
{kind=link}
Abstract
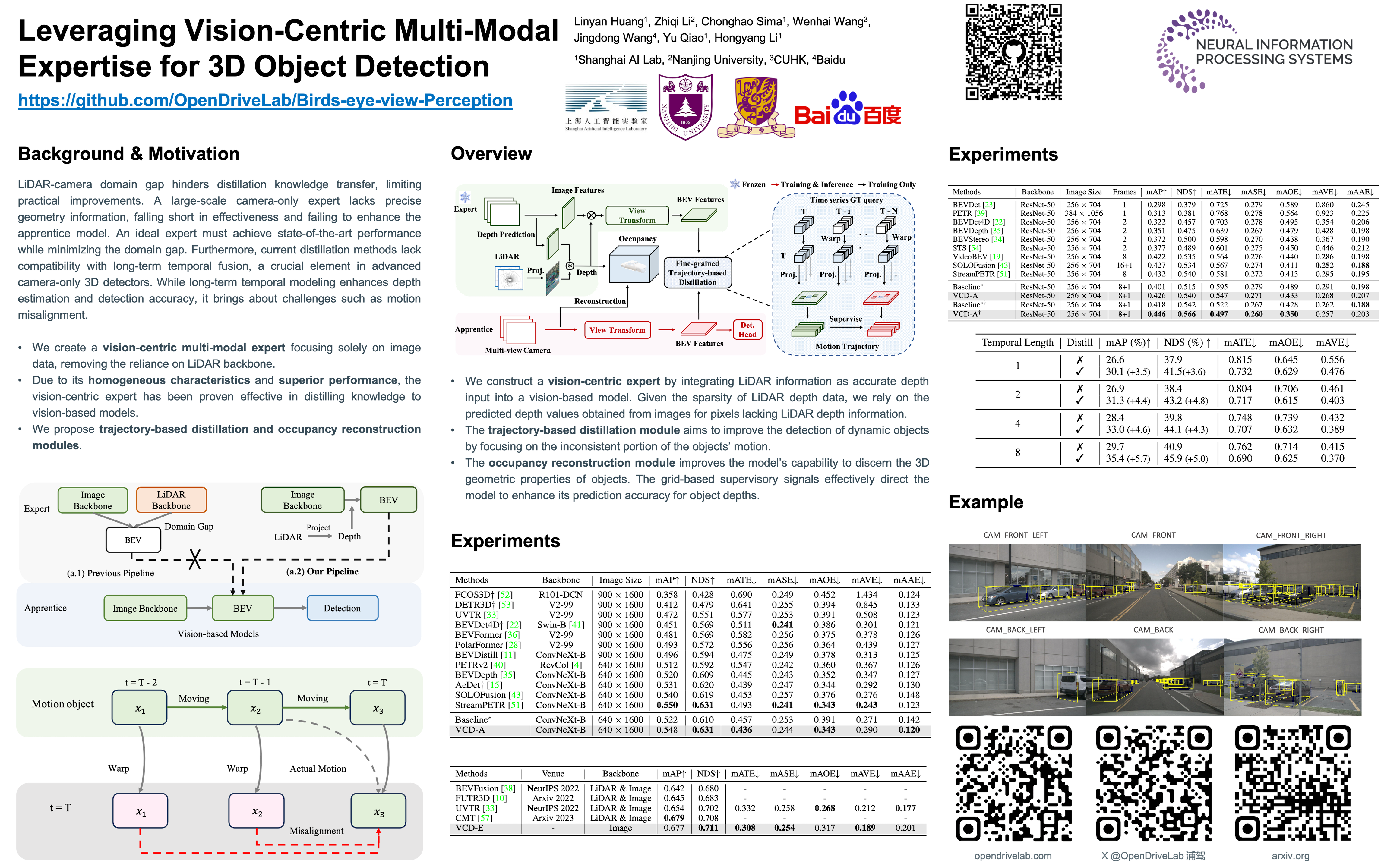
Current research is primarily dedicated to advancing the accuracy of camera-only 3D object detectors (apprentice) through the knowledge transferred from LiDAR- or multi-modal-based counterparts (expert). However, the presence of the domain gap between LiDAR and camera features, coupled with the inherent incompatibility in temporal fusion, significantly hinders the effectiveness of distillation-based enhancements for apprentices. Motivated by the success of uni-modal distillation, an apprentice-friendly expert model would predominantly rely on camera features, while still achieving comparable performance to multi-modal models. To this end, we introduce VCD, a framework to improve the camera-only apprentice model, including an apprentice-friendly multi-modal expert and temporal-fusion-friendly distillation supervision. The multi-modal expert VCD-E adopts an identical structure as that of the camera-only apprentice in order to alleviate the feature disparity, and leverages LiDAR input as a depth prior to reconstruct the 3D scene, achieving the performance on par with other heterogeneous multi-modal experts. Additionally, a fine-grained trajectory-based distillation module is introduced with the purpose of individually rectifying the motion misalignment for each object in the scene. With those improvements, our camera-only apprentice VCD-A sets new state-of-the-art on nuScenes with a score of 63.1% NDS. The code will be released at https://github.com/OpenDriveLab/Birds-eye-view-Perception.