3DOS: Towards 3D Open Set Learning - Benchmarking and Understanding Semantic Novelty Detection on Point Clouds
{kind=link}
Abstract
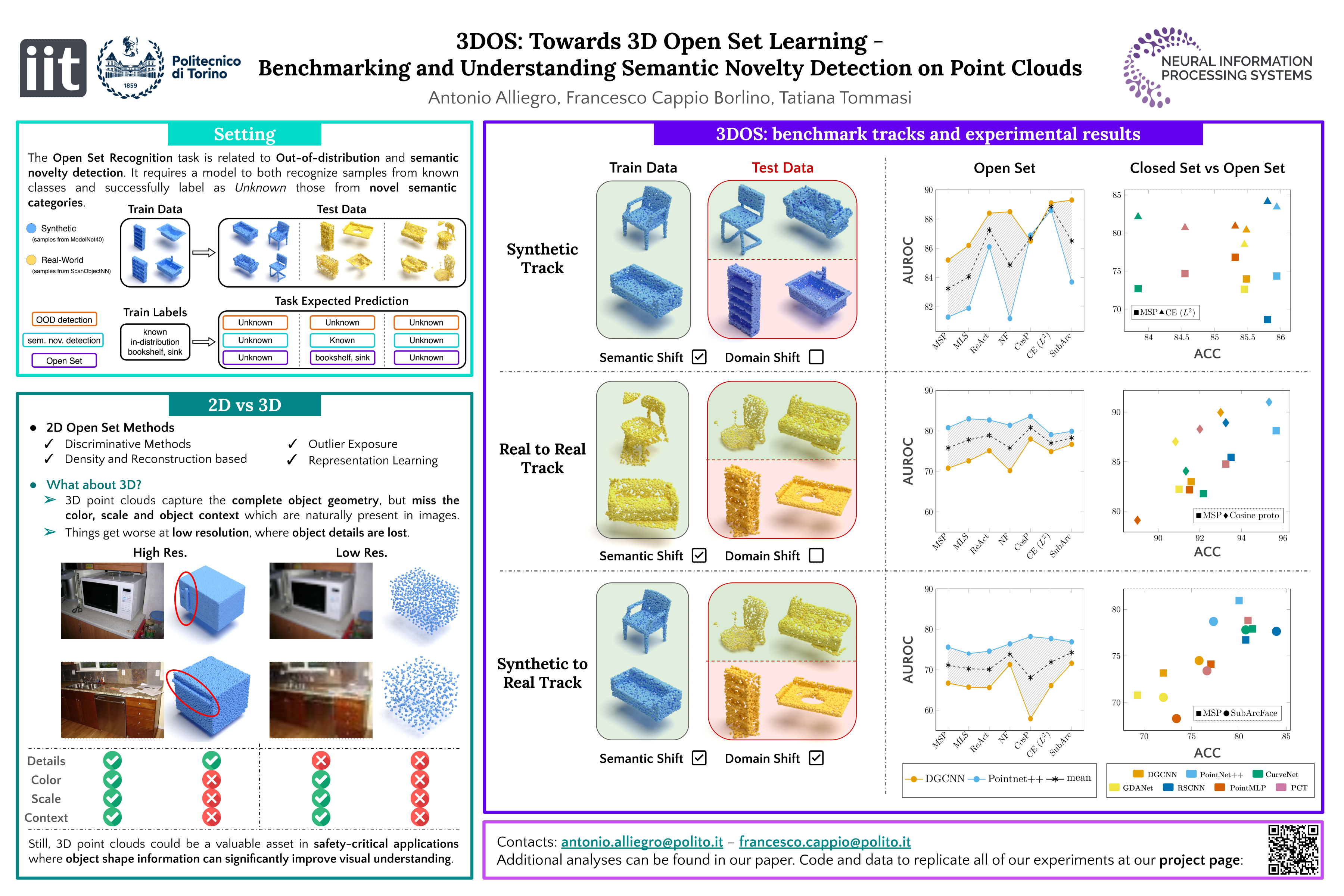
In recent years there has been significant progress in the field of 3D learning on classification, detection and segmentation problems. The vast majority of the existing studies focus on canonical closed-set conditions, neglecting the intrinsic open nature of the real-world. This limits the abilities of robots and autonomous systems involved in safety-critical applications that require managing novel and unknown signals. In this context exploiting 3D data can be a valuable asset since it provides rich information about the geometry of perceived objects and scenes. With this paper we provide the first broad study on 3D Open Set learning. We introduce 3DOS: a novel testbed for semantic novelty detection that considers several settings with increasing difficulties in terms of semantic (category) shift, and covers both in-domain (synthetic-to-synthetic, real-to-real) and cross-domain (synthetic-to-real) scenarios. Moreover, we investigate the related 2D Open Set literature to understand if and how its recent improvements are effective on 3D data. Our extensive benchmark positions several algorithms in the same coherent picture, revealing their strengths and limitations. The results of our analysis may serve as a reliable foothold for future tailored 3D Open Set methods.