Learning Long-Term Crop Management Strategies with CyclesGym
{kind=link}
Abstract
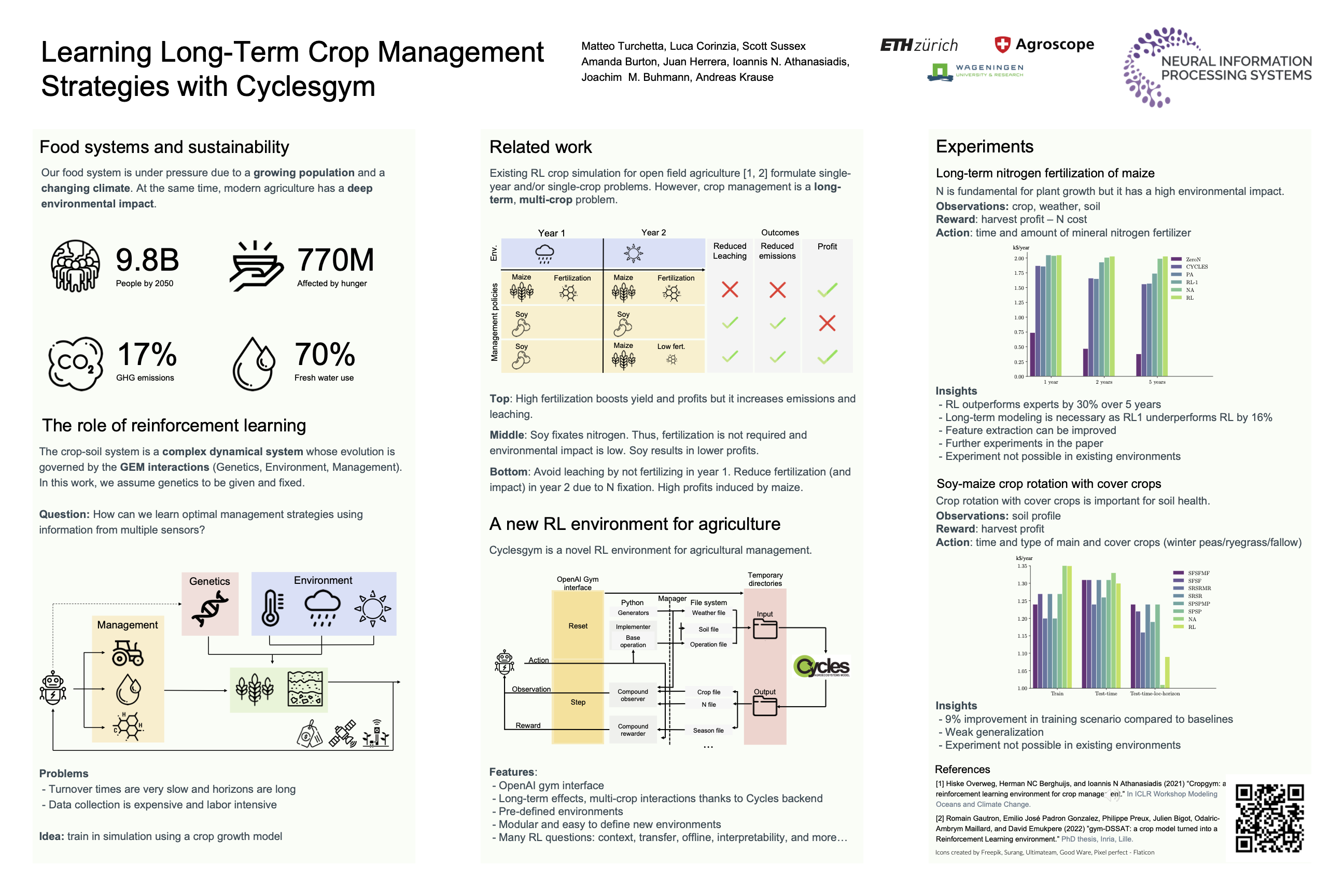
To improve the sustainability and resilience of modern food systems, designing improved crop management strategies is crucial. The increasing abundance of data on agricultural systems suggests that future strategies could benefit from adapting to environmental conditions, but how to design these adaptive policies poses a new frontier. A natural technique for learning policies in these kinds of sequential decision-making problems is reinforcement learning (RL). To obtain the large number of samples required to learn effective RL policies, existing work has used mechanistic crop growth models (CGMs) as simulators. These solutions focus on single-year, single-crop simulations for learning strategies for a single agricultural management practice. However, to learn sustainable long-term policies we must be able to train in multi-year environments, with multiple crops, and consider a wider array of management techniques. We introduce CYCLESGYM, an RL environment based on the multi-year, multi-crop CGM Cycles. CYCLESGYM allows for long-term planning in agroecosystems, provides modular state space and reward constructors and weather generators, and allows for complex actions. For RL researchers, this is a novel benchmark to investigate issues arising in real-world applications. For agronomists, we demonstrate the potential of RL as a powerful optimization tool for agricultural systems management in multi-year case studies on nitrogen (N) fertilization and crop planning scenarios.