Dungeons and Data: A Large-Scale NetHack Dataset
{kind=link}
Abstract
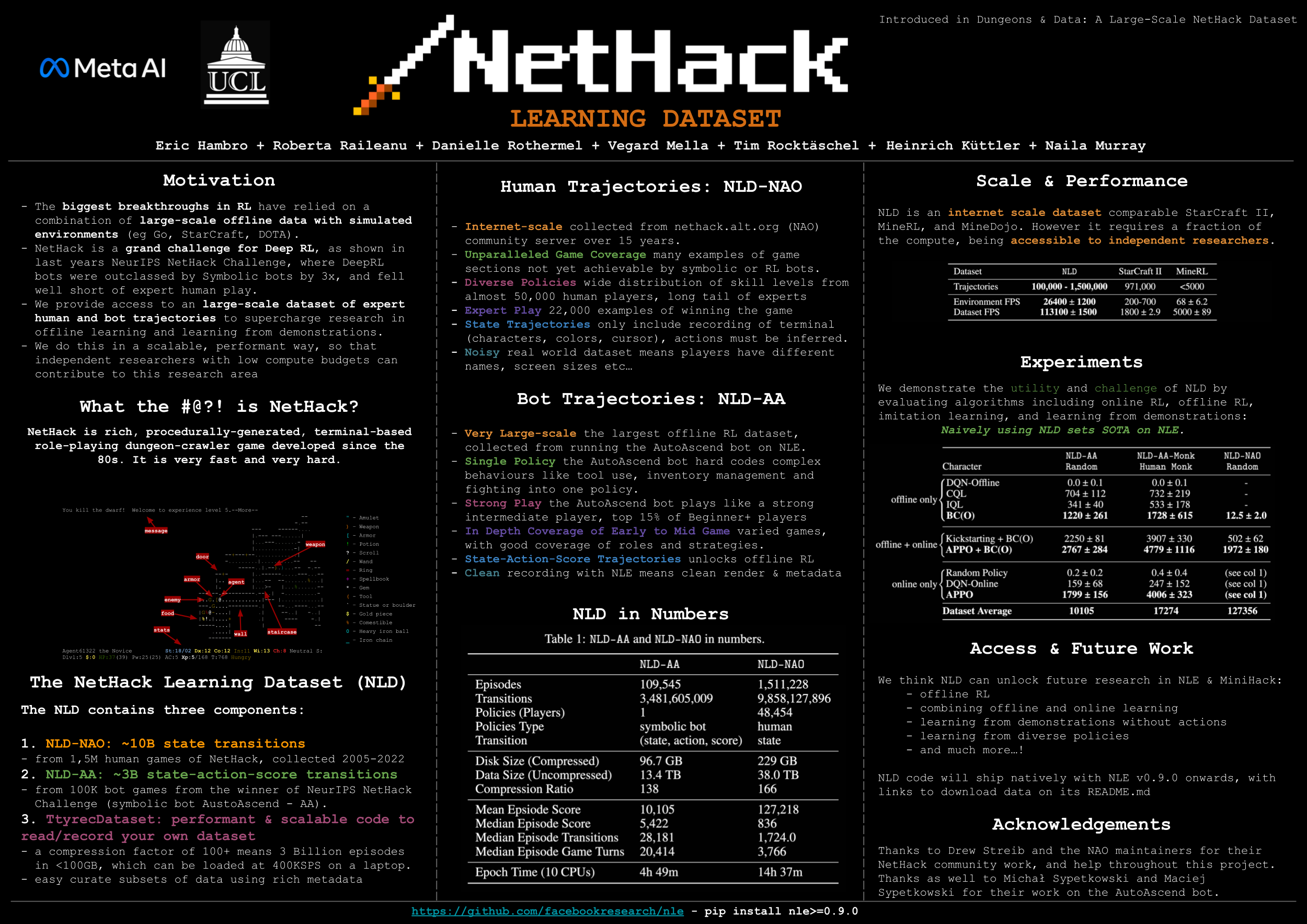
Recent breakthroughs in the development of agents to solve challenging sequential decision making problems such as Go, StarCraft, or DOTA, have relied on both simulated environments and large-scale datasets. However, progress on this research has been hindered by the scarcity of open-sourced datasets and the prohibitive computational cost to work with them. Here we present the NetHack Learning Dataset (NLD), a large and highly-scalable dataset of trajectories from the popular game of NetHack, which is both extremely challenging for current methods and very fast to run. NLD consists of three parts: 10 billion state transitions from 1.5 million human trajectories collected on the NAO public NetHack server from 2009 to 2020; 3 billion state-action-score transitions from 100,000 trajectories collected from the symbolic bot winner of the NetHack Challenge 2021; and, accompanying code for users to record, load and stream any collection of such trajectories in a highly compressed form. We evaluate a wide range of existing algorithms for learning from demonstrations, showing that significant research advances are needed to fully leverage large-scale datasets for challenging sequential decision making tasks.