Prototypical VoteNet for Few-Shot 3D Point Cloud Object Detection
{kind=link}
Abstract
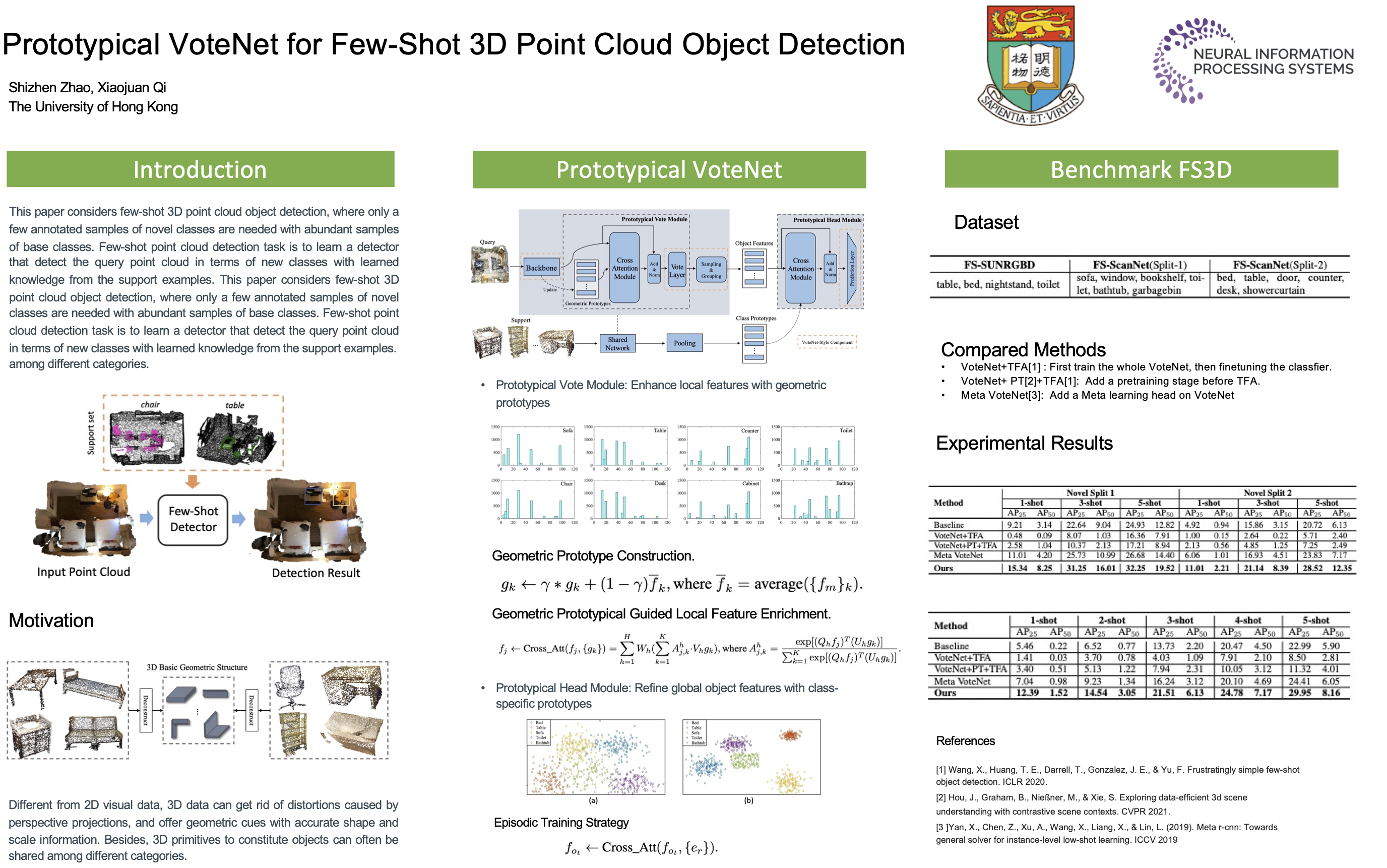
Most existing 3D point cloud object detection approaches heavily rely on large amounts of labeled training data. However, the labeling process is costly and time-consuming. This paper considers few-shot 3D point cloud object detection, where only a few annotated samples of novel classes are needed with abundant samples of base classes. To this end, we propose Prototypical VoteNet to recognize and localize novel instances, which incorporates two new modules: Prototypical Vote Module (PVM) and Prototypical Head Module (PHM). Specifically, as the 3D basic geometric structures can be shared among categories, PVM is designed to leverage class-agnostic geometric prototypes, which are learned from base classes, to refine local features of novel categories. Then PHM is proposed to utilize class prototypes to enhance the global feature of each object, facilitating subsequent object localization and classification, which is trained by the episodic training strategy. To evaluate the model in this new setting, we contribute two new benchmark datasets, FS-ScanNet and FS-SUNRGBD. We conduct extensive experiments to demonstrate the effectiveness of Prototypical VoteNet, and our proposed method shows significant and consistent improvements compared to baselines on two benchmark datasets.