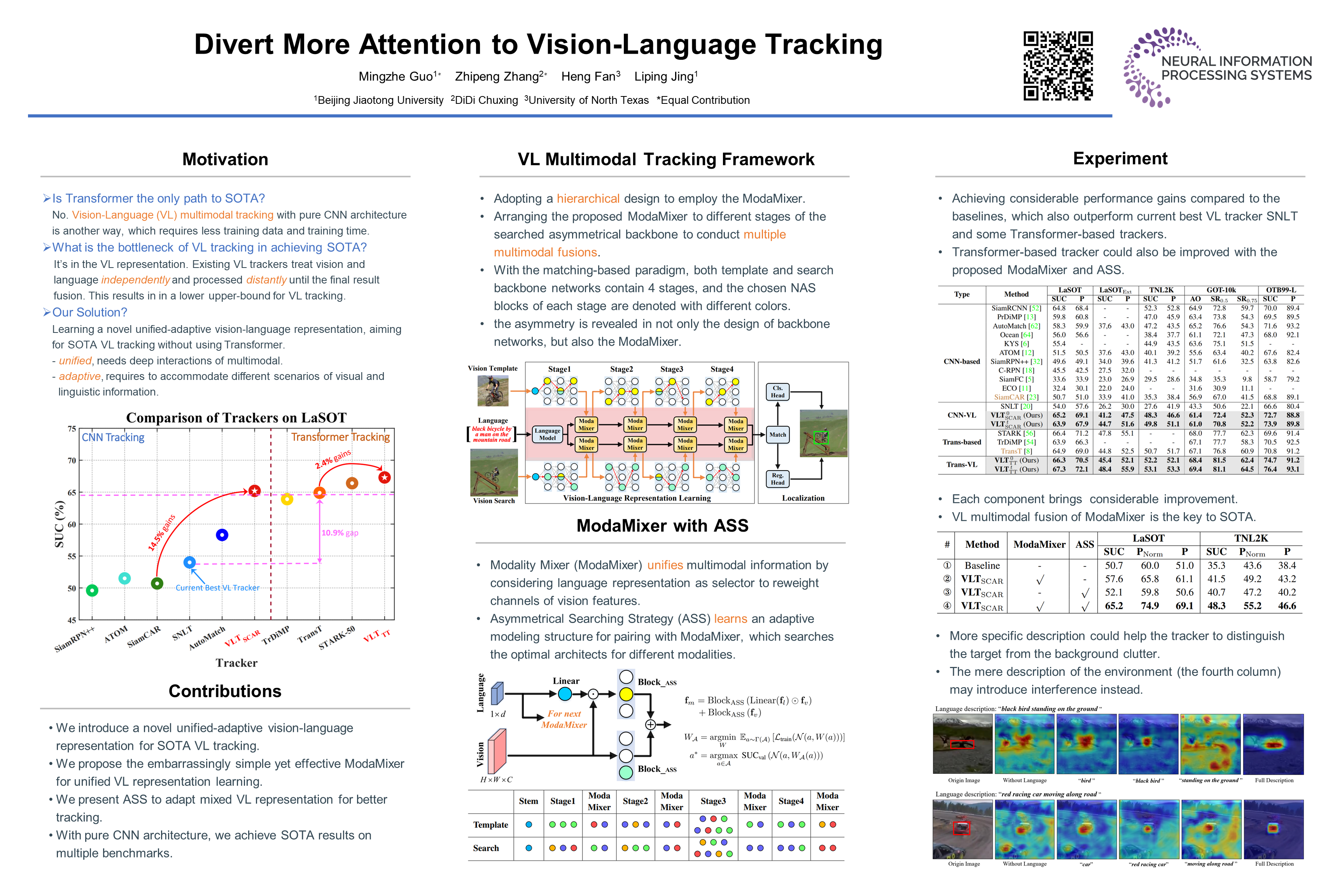
Divert More Attention to Vision-Language Tracking
Mingzhe Guo ⋅ Zhipeng Zhang ⋅ Heng Fan ⋅ Liping Jing
Keywords:
Asymmetrical Searching Strategy
Multimodal Learning
Visual Object Tracking
Vision-Language Representation
{kind=link}
Abstract
Relying on Transformer for complex visual feature learning, object tracking has witnessed the new standard for state-of-the-arts (SOTAs). However, this advancement accompanies by larger training data and longer training period, making tracking increasingly expensive. In this paper, we demonstrate that the Transformer-reliance is not necessary and the pure ConvNets are still competitive and even better yet more economical and friendly in achieving SOTA tracking. Our solution is to unleash the power of multimodal vision-language (VL) tracking, simply using ConvNets. The essence lies in learning novel unified-adaptive VL representations with our modality mixer (ModaMixer) and asymmetrical ConvNet search. We show that our unified-adaptive VL representation, learned purely with the ConvNets, is a simple yet strong alternative to Transformer visual features, by unbelievably improving a CNN-based Siamese tracker by 14.5% in SUC on challenging LaSOT (50.7%$\rightarrow$65.2%), even outperforming several Transformer-based SOTA trackers. Besides empirical results, we theoretically analyze our approach to evidence its effectiveness. By revealing the potential of VL representation, we expect the community to divert more attention to VL tracking and hope to open more possibilities for future tracking beyond Transformer. Code and models are released at https://github.com/JudasDie/SOTS.
Video
Chat is not available.
Successful Page Load