Learning Active Camera for Multi-Object Navigation
{kind=link}
Abstract
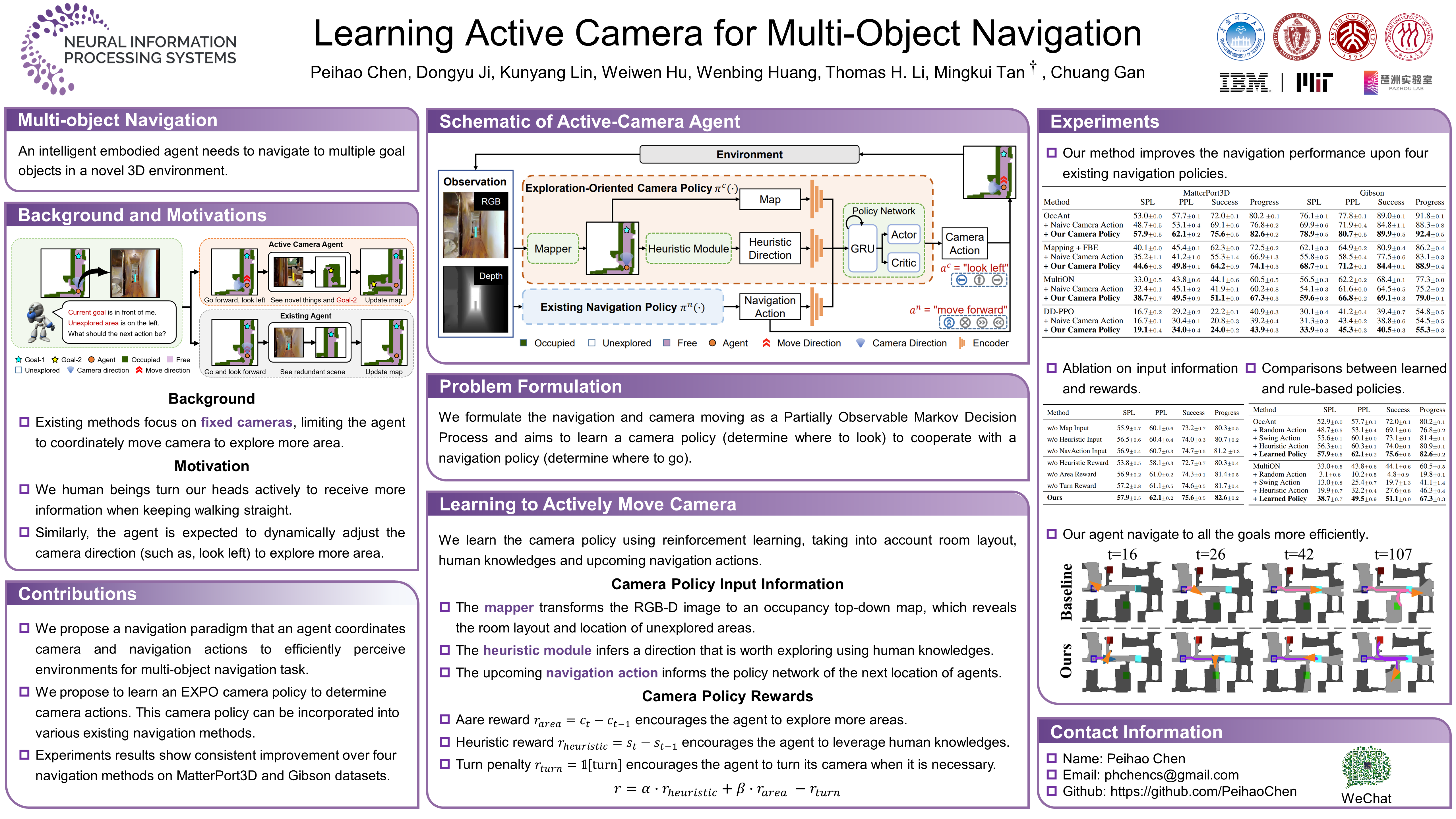
Getting robots to navigate to multiple objects autonomously is essential yet difficult in robot applications. One of the key challenges is how to explore environments efficiently with camera sensors only. Existing navigation methods mainly focus on fixed cameras and few attempts have been made to navigate with active cameras. As a result, the agent may take a very long time to perceive the environment due to limited camera scope. In contrast, humans typically gain a larger field of view by looking around for a better perception of the environment. How to make robots perceive the environment as efficiently as humans is a fundamental problem in robotics. In this paper, we consider navigating to multiple objects more efficiently with active cameras. Specifically, we cast moving camera to a Markov Decision Process and reformulate the active camera problem as a reinforcement learning problem. However, we have to address two new challenges: 1) how to learn a good camera policy in complex environments and 2) how to coordinate it with the navigation policy. To address these, we carefully design a reward function to encourage the agent to explore more areas by moving camera actively. Moreover, we exploit human experience to infer a rule-based camera action to guide the learning process. Last, to better coordinate two kinds of policies, the camera policy takes navigation actions into account when making camera moving decisions. Experimental results show our camera policy consistently improves the performance of multi-object navigation over four baselines on two datasets.