A Near-Optimal Primal-Dual Method for Off-Policy Learning in CMDP
Fan Chen ⋅ Junyu Zhang ⋅ Zaiwen Wen
Keywords:
Primal-dual
Reinforcement Learning Theory
Safe Reinforcement Learning
statistical optimality
offline reinforcement learning
2022 Poster
{kind=link}
Abstract
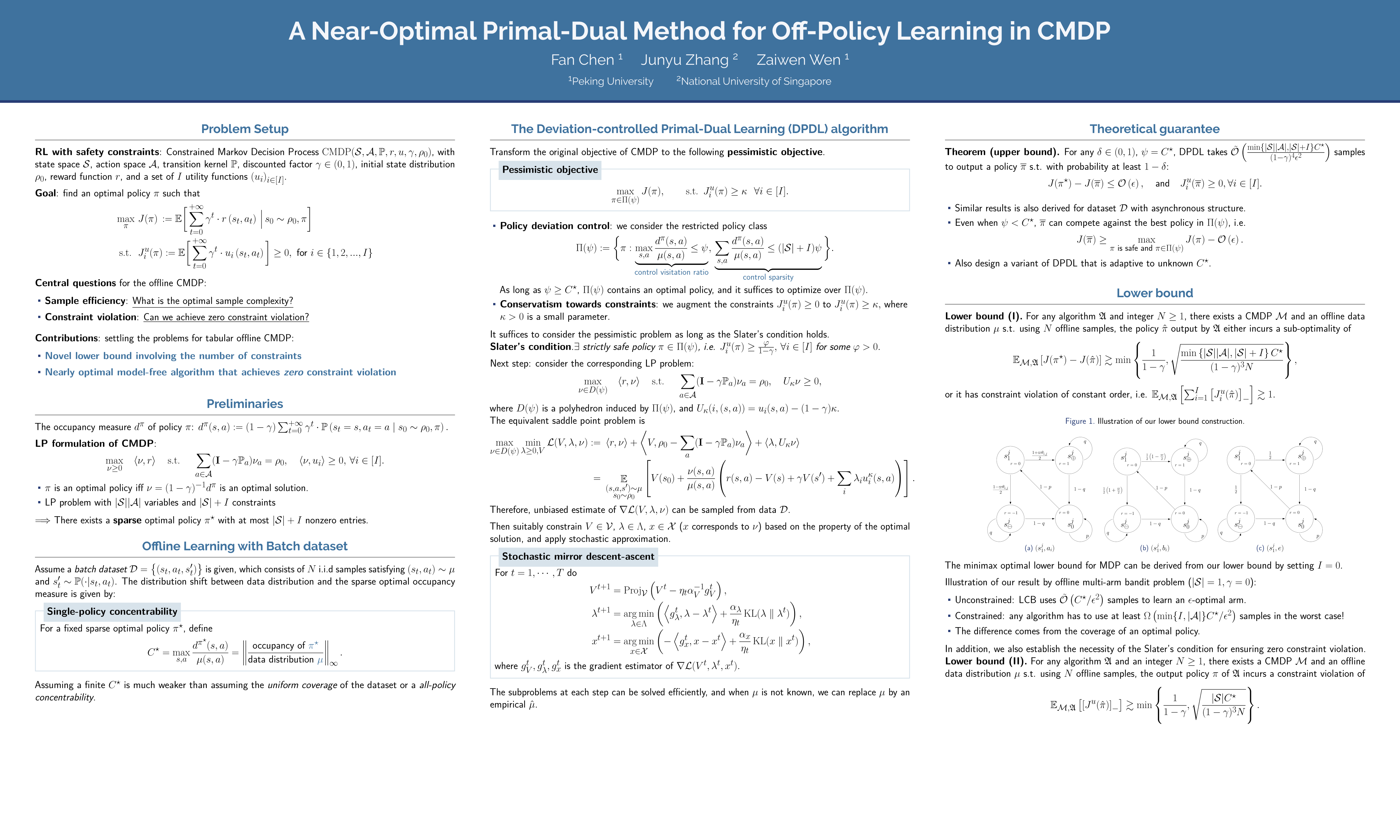
As an important framework for safe Reinforcement Learning, the Constrained Markov Decision Process (CMDP) has been extensively studied in the recent literature. However, despite the rich results under various on-policy learning settings, there still lacks some essential understanding of the offline CMDP problems, in terms of both the algorithm design and the information theoretic sample complexity lower bound. In this paper, we focus on solving the CMDP problems where only offline data are available. By adopting the concept of the single-policy concentrability coefficient $C^*$, we establish an $\Omega\left(\frac{\min\left\{|\mathcal{S}||\mathcal{A}|,|\mathcal{S}|+I\right\} C^*}{(1-\gamma)^3\epsilon^2}\right)$ sample complexity lower bound for the offline CMDP problem, where $I$ stands for the number of constraints. By introducing a simple but novel deviation control mechanism, we propose a near-optimal primal-dual learning algorithm called DPDL. This algorithm provably guarantees zero constraint violation and its sample complexity matches the above lower bound except for an $\tilde{\mathcal{O}}((1-\gamma)^{-1})$ factor. Comprehensive discussion on how to deal with the unknown constant $C^*$ and the potential asynchronous structure on the offline dataset are also included.
Video
Chat is not available.
Successful Page Load