Improving Policy Learning via Language Dynamics Distillation
{kind=link}
Abstract
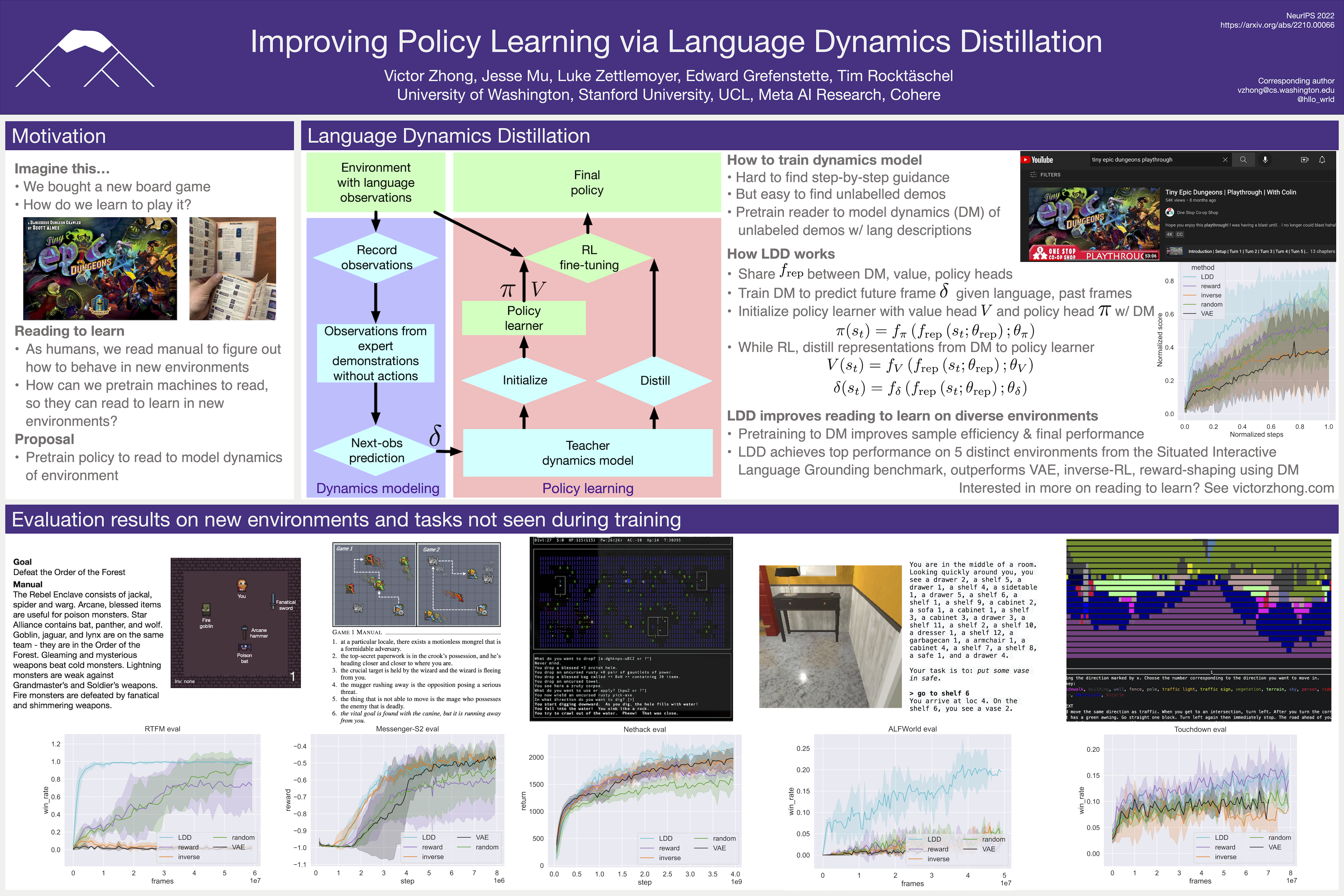
Recent work has shown that augmenting environments with language descriptions improves policy learning. However, for environments with complex language abstractions, learning how to ground language to observations is difficult due to sparse, delayed rewards. We propose Language Dynamics Distillation (LDD), which pretrains a model to predict environment dynamics given demonstrations with language descriptions, and then fine-tunes these language-aware pretrained representations via reinforcement learning (RL). In this way, the model is trained to both maximize expected reward and retain knowledge about how language relates to environment dynamics. On SILG, a benchmark of five tasks with language descriptions that evaluate distinct generalization challenges on unseen environments (NetHack, ALFWorld, RTFM, Messenger, and Touchdown), LDD outperforms tabula-rasa RL, VAE pretraining, and methods that learn from unlabeled demonstrations in inverse RL and reward shaping with pretrained experts. In our analyses, we show that language descriptions in demonstrations improve sample-efficiency and generalization across environments, and that dynamics modeling with expert demonstrations is more effective than with non-experts.