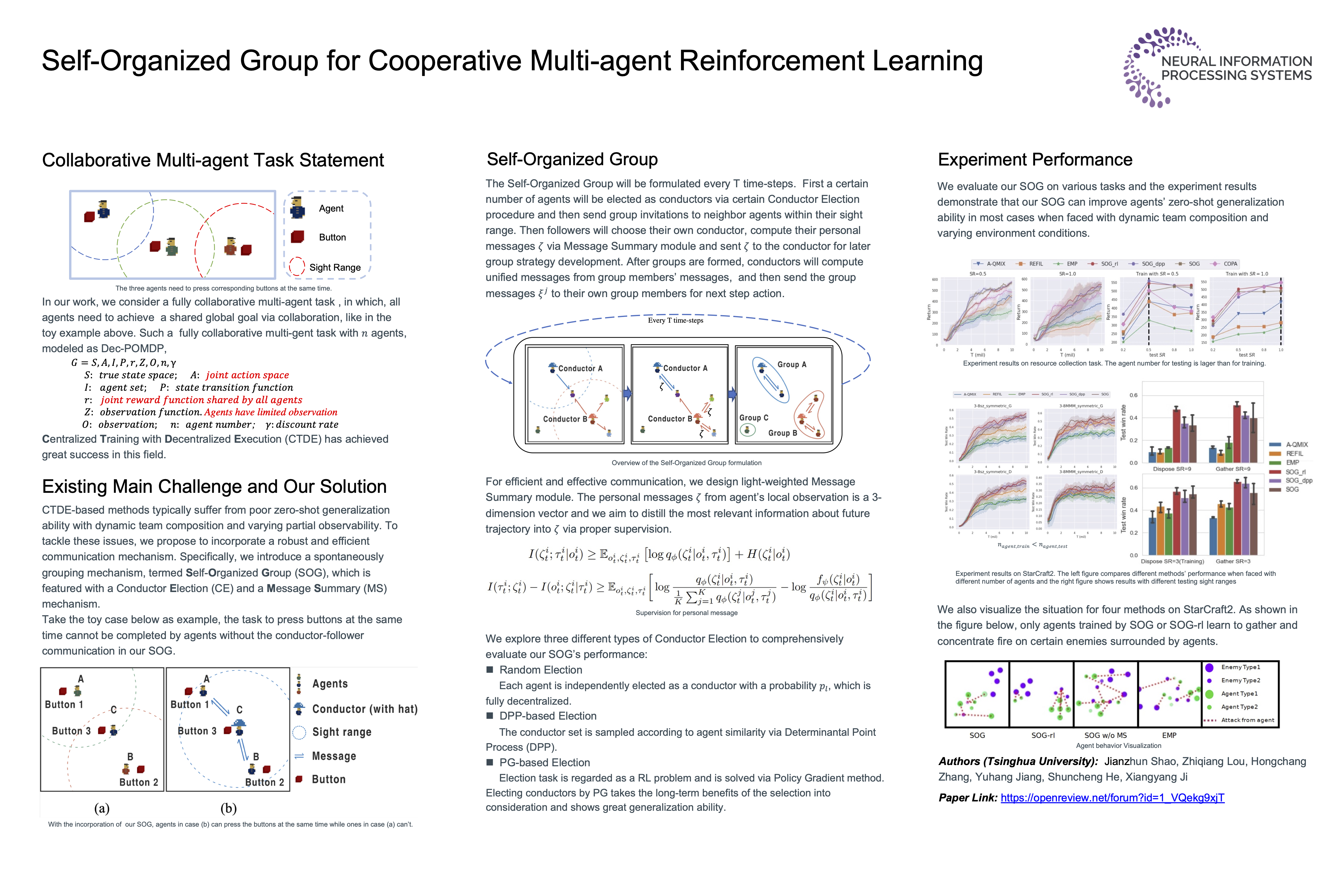
Self-Organized Group for Cooperative Multi-agent Reinforcement Learning
Jianzhun Shao ⋅ Zhiqiang Lou ⋅ Hongchang Zhang ⋅ Yuhang Jiang ⋅ Shuncheng He ⋅ Xiangyang Ji
Keywords:
multi-agent reinforcement learning
{kind=link}
Abstract
Centralized training with decentralized execution (CTDE) has achieved great success in cooperative multi-agent reinforcement learning (MARL) in practical applications. However, CTDE-based methods typically suffer from poor zero-shot generalization ability with dynamic team composition and varying partial observability. To tackle these issues, we propose a spontaneously grouping mechanism, termed Self-Organized Group (SOG), which is featured with conductor election (CE) and message summary (MS). In CE, a certain number of conductors are elected every $T$ time-steps to temporally construct groups, each with conductor-follower consensus where the followers are constrained to only communicate with their conductor. In MS, each conductor summarize and distribute the received messages to all affiliate group members to hold a unified scheduling. SOG provides zero-shot generalization ability to the dynamic number of agents and the varying partial observability. Sufficient experiments on mainstream multi-agent benchmarks exhibit superiority of SOG.
Video
Chat is not available.
Successful Page Load