LobsDICE: Offline Learning from Observation via Stationary Distribution Correction Estimation
{kind=link}
Abstract
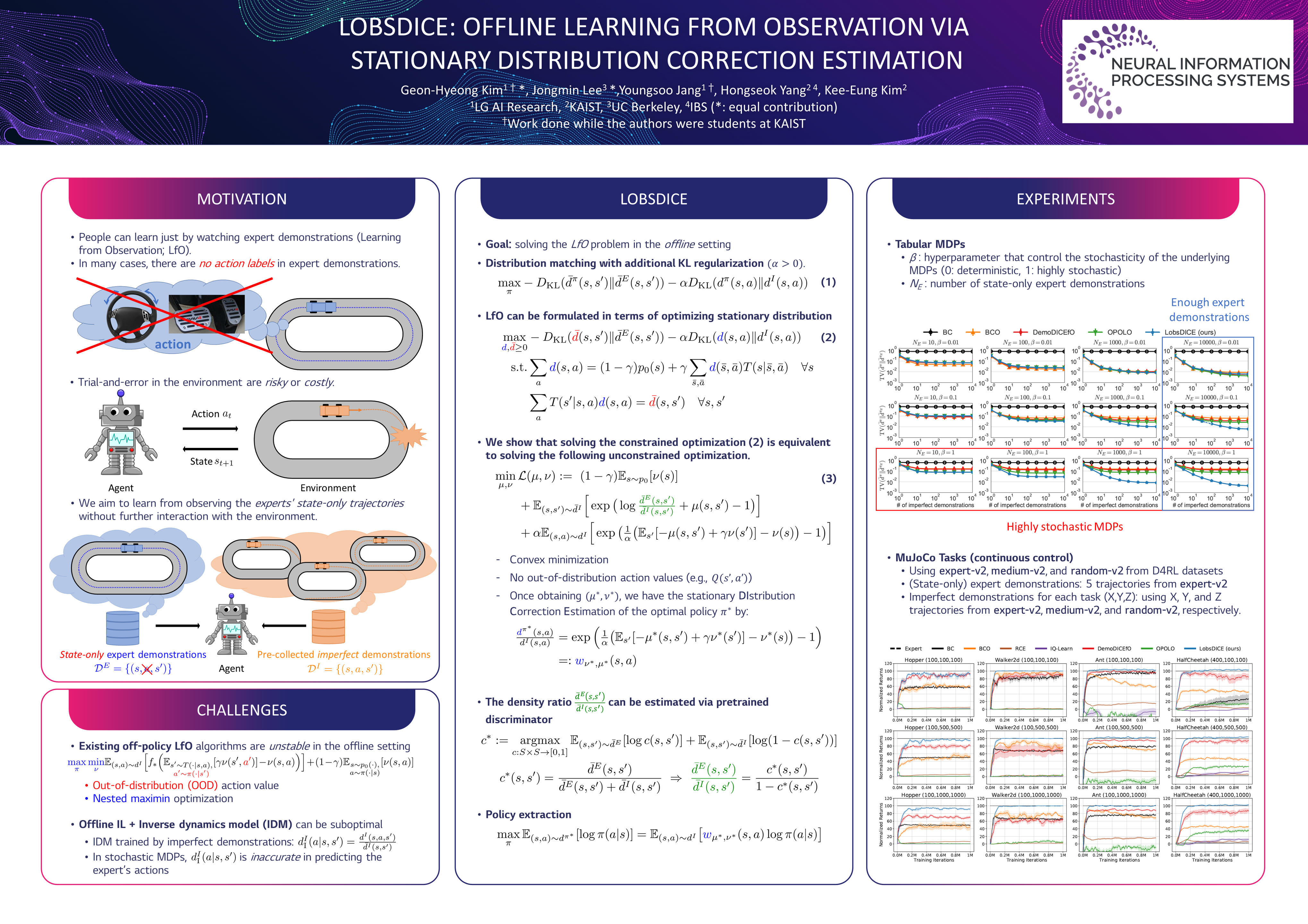
We consider the problem of learning from observation (LfO), in which the agent aims to mimic the expert's behavior from the state-only demonstrations by experts. We additionally assume that the agent cannot interact with the environment but has access to the action-labeled transition data collected by some agents with unknown qualities. This offline setting for LfO is appealing in many real-world scenarios where the ground-truth expert actions are inaccessible and the arbitrary environment interactions are costly or risky. In this paper, we present LobsDICE, an offline LfO algorithm that learns to imitate the expert policy via optimization in the space of stationary distributions. Our algorithm solves a single convex minimization problem, which minimizes the divergence between the two state-transition distributions induced by the expert and the agent policy. Through an extensive set of offline LfO tasks, we show that LobsDICE outperforms strong baseline methods.