Dynamic Inverse Reinforcement Learning for Characterizing Animal Behavior
{kind=link}
Abstract
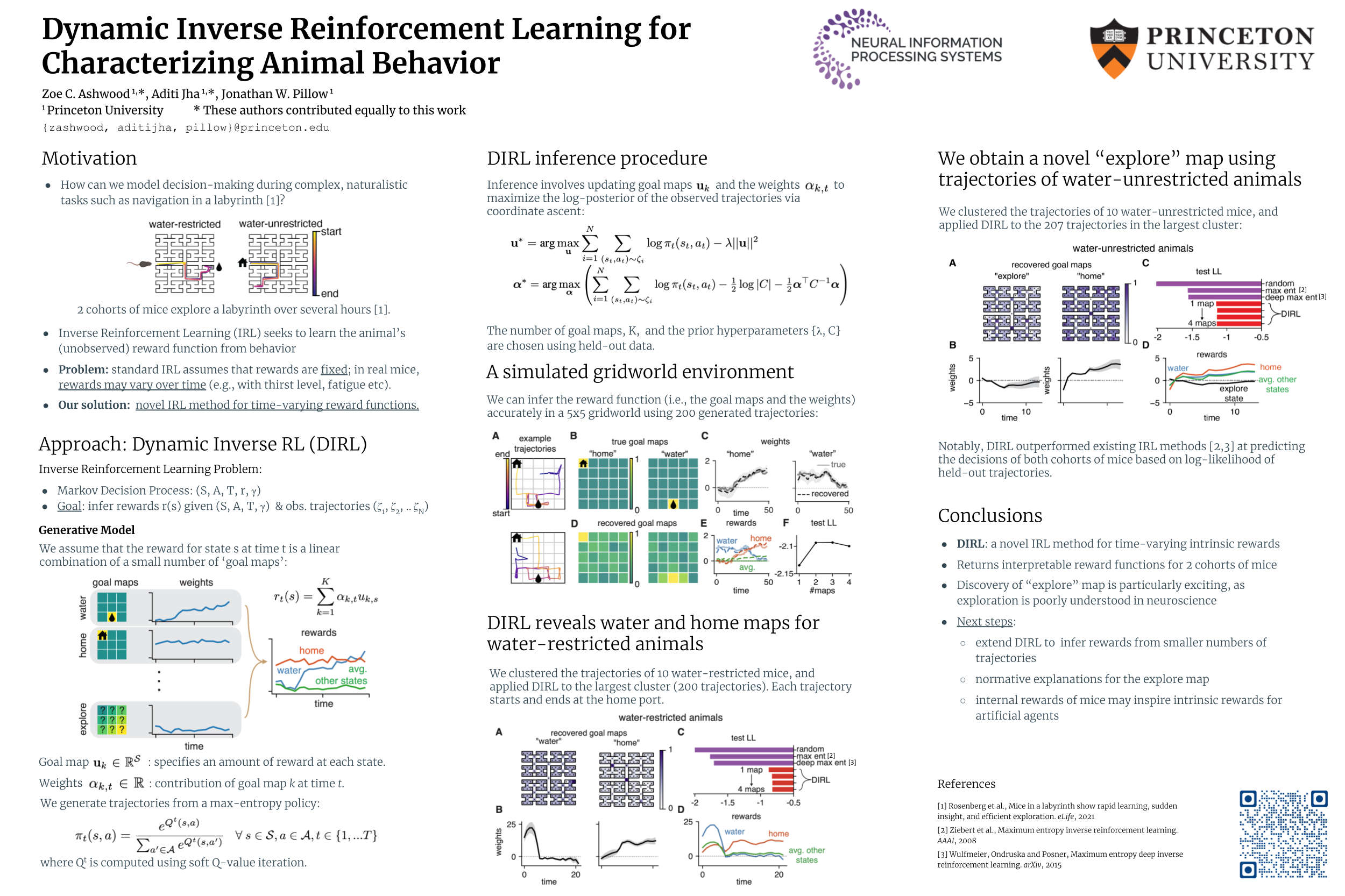
Understanding decision-making is a core goal in both neuroscience and psychology, and computational models have often been helpful in the pursuit of this goal. While many models have been developed for characterizing behavior in binary decision-making and bandit tasks, comparatively little work has focused on animal decision-making in more complex tasks, such as navigation through a maze. Inverse reinforcement learning (IRL) is a promising approach for understanding such behavior, as it aims to infer the unknown reward function of an agent from its observed trajectories through state space. However, IRL has yet to be widely applied in neuroscience. One potential reason for this is that existing IRL frameworks assume that an agent's reward function is fixed over time. To address this shortcoming, we introduce dynamic inverse reinforcement learning (DIRL), a novel IRL framework that allows for time-varying intrinsic rewards. Our method parametrizes the unknown reward function as a time-varying linear combination of spatial reward maps (which we refer to as "goal maps"). We develop an efficient inference method for recovering this dynamic reward function from behavioral data. We demonstrate DIRL in simulated experiments and then apply it to a dataset of mice exploring a labyrinth. Our method returns interpretable reward functions for two separate cohorts of mice, and provides a novel characterization of exploratory behavior. We expect DIRL to have broad applicability in neuroscience, and to facilitate the design of biologically-inspired reward functions for training artificial agents.