Towards Safe Reinforcement Learning with a Safety Editor Policy
{kind=link}
Abstract
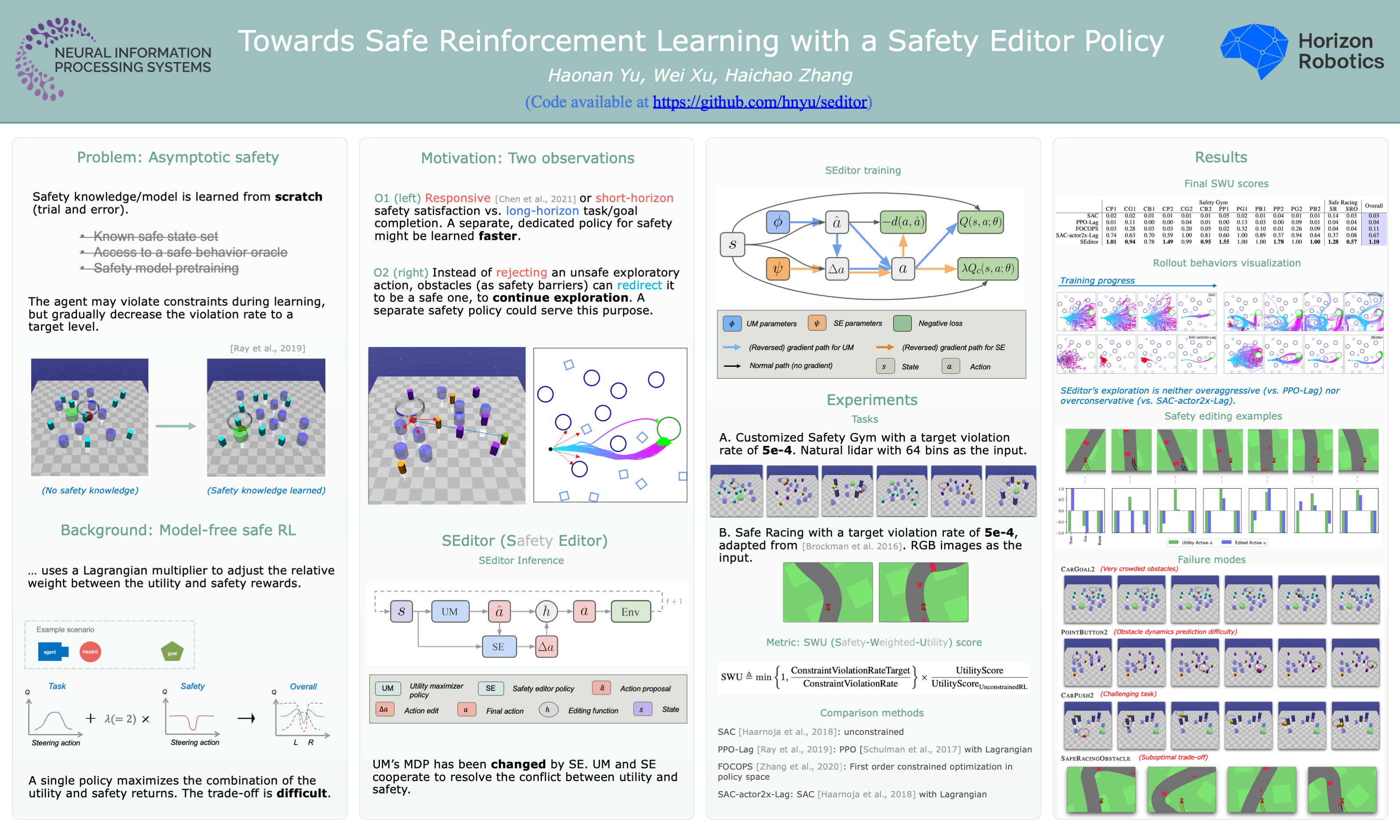
We consider the safe reinforcement learning (RL) problem of maximizing utility with extremely low constraint violation rates. Assuming no prior knowledge or pre-training of the environment safety model given a task, an agent has to learn, via exploration, which states and actions are safe. A popular approach in this line of research is to combine a model-free RL algorithm with the Lagrangian method to adjust the weight of the constraint reward relative to the utility reward dynamically. It relies on a single policy to handle the conflict between utility and constraint rewards, which is often challenging. We present SEditor, a two-policy approach that learns a safety editor policy transforming potentially unsafe actions proposed by a utility maximizer policy into safe ones. The safety editor is trained to maximize the constraint reward while minimizing a hinge loss of the utility state-action values before and after an action is edited. SEditor extends existing safety layer designs that assume simplified safety models, to general safe RL scenarios where the safety model can in theory be arbitrarily complex. As a first-order method, it is easy to implement and efficient for both inference and training. On 12 Safety Gym tasks and 2 safe racing tasks, SEditor obtains much a higher overall safety-weighted-utility (SWU) score than the baselines, and demonstrates outstanding utility performance with constraint violation rates as low as once per 2k time steps, even in obstacle-dense environments. On some tasks, this low violation rate is up to 200 times lower than that of an unconstrained RL method with similar utility performance. Code is available at https://github.com/hnyu/seditor.