ZSON: Zero-Shot Object-Goal Navigation using Multimodal Goal Embeddings
{kind=link}
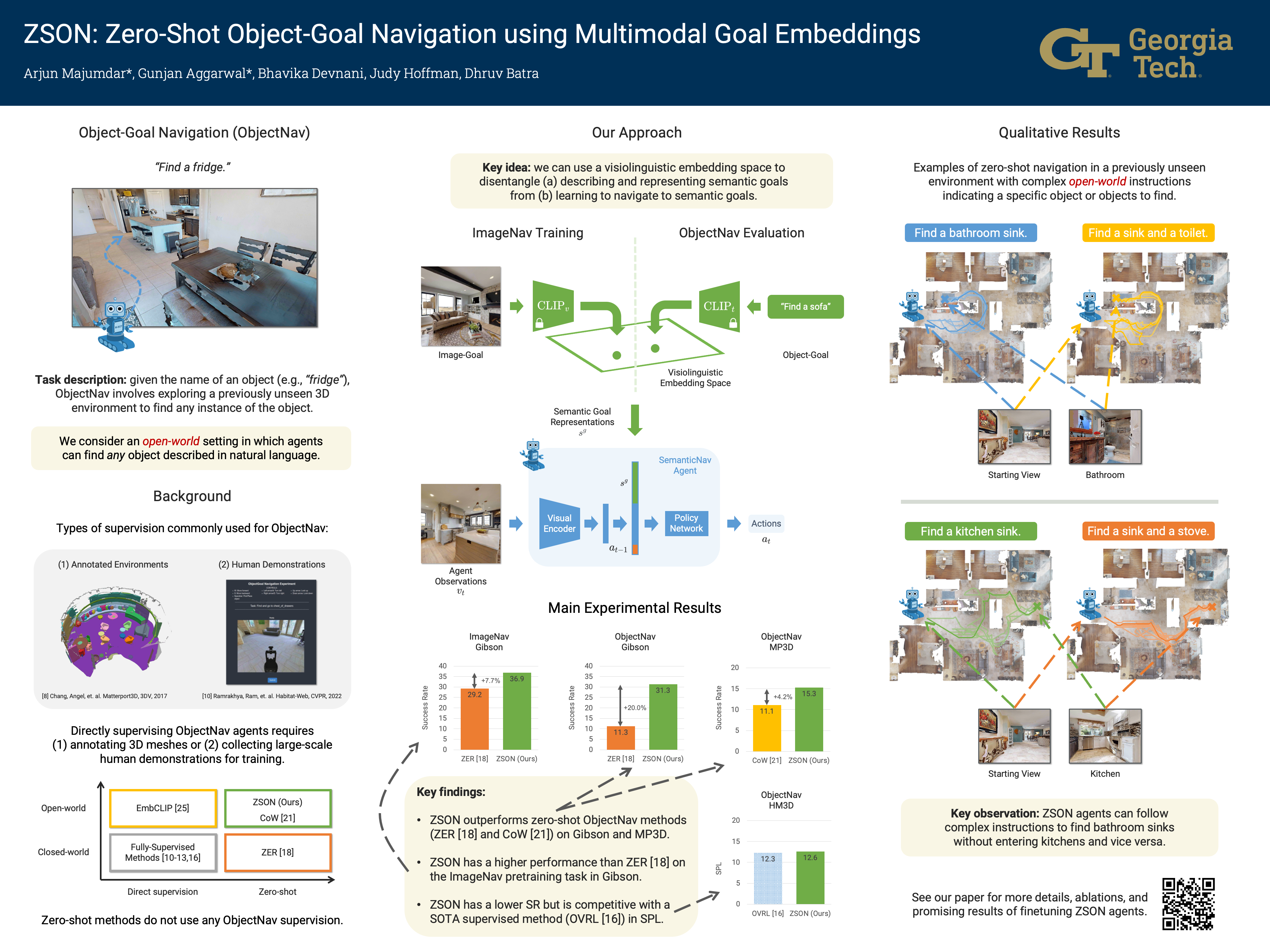
Abstract
We present a scalable approach for learning open-world object-goal navigation (ObjectNav) – the task of asking a virtual robot (agent) to find any instance of an object in an unexplored environment (e.g., “find a sink”). Our approach is entirely zero-shot – i.e., it does not require ObjectNav rewards or demonstrations of any kind. Instead, we train on the image-goal navigation (ImageNav) task, in which agents find the location where a picture (i.e., goal image) was captured. Specifically, we encode goal images into a multimodal, semantic embedding space to enable training semantic-goal navigation (SemanticNav) agents at scale in unannotated 3D environments (e.g., HM3D). After training, SemanticNav agents can be instructed to find objects described in free-form natural language (e.g., “sink,” “bathroom sink,” etc.) by projecting language goals into the same multimodal, semantic embedding space. As a result, our approach enables open-world ObjectNav. We extensively evaluate our agents on three ObjectNav datasets (Gibson, HM3D, and MP3D) and observe absolute improvements in success of 4.2% - 20.0% over existing zero-shot methods. For reference, these gains are similar or better than the 5% improvement in success between the Habitat 2020 and 2021 ObjectNav challenge winners. In an open-world setting, we discover that our agents can generalize to compound instructions with a room explicitly mentioned (e.g., “Find a kitchen sink”) and when the target room can be inferred (e.g., “Find a sink and a stove”).