TaSIL: Taylor Series Imitation Learning
Daniel Pfrommer ⋅ Thomas Zhang ⋅ Stephen Tu ⋅ Nikolai Matni
2022 Poster
{kind=link}
Abstract
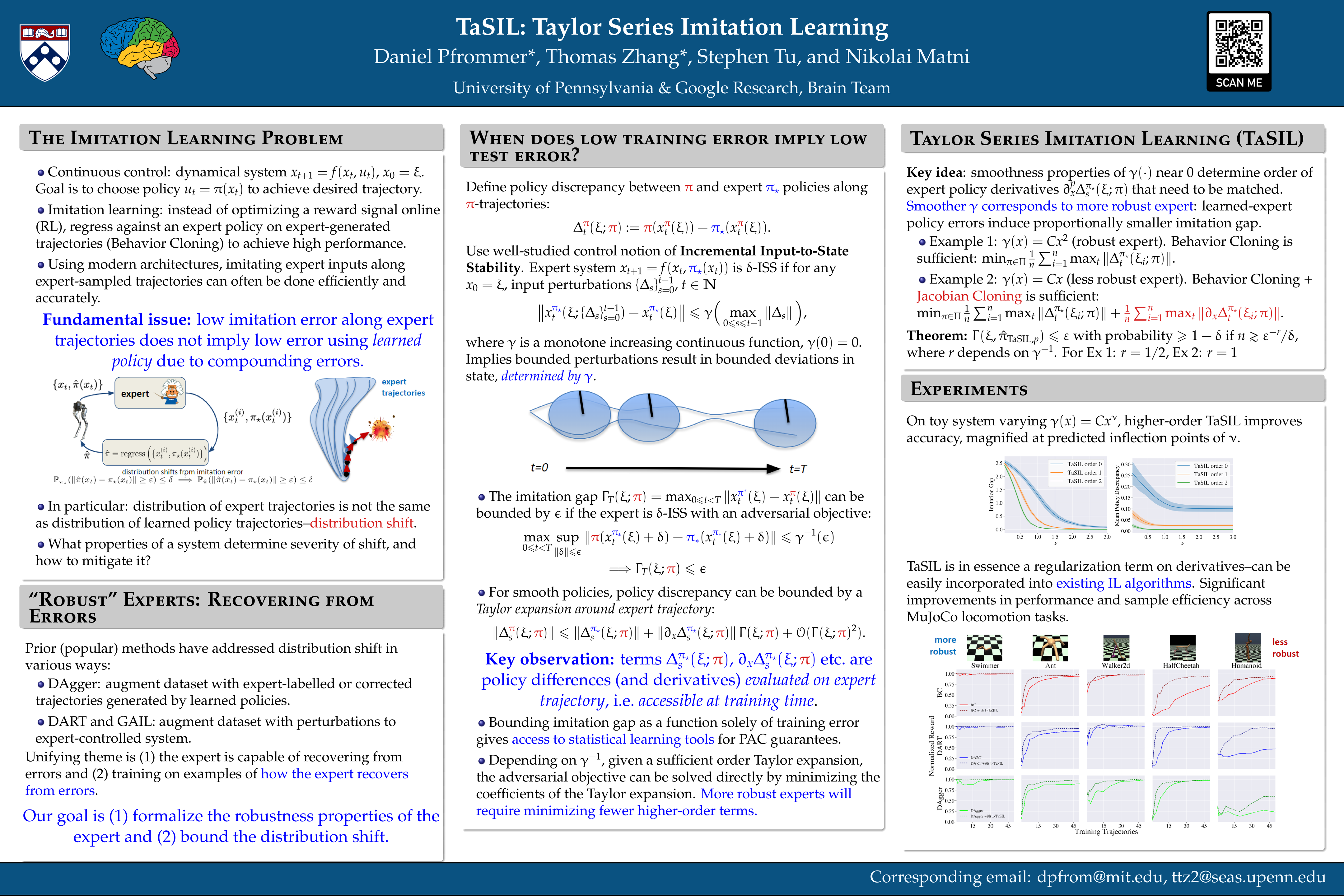
We propose Taylor Series Imitation Learning (TaSIL), a simple augmentation to standard behavior cloning losses in the context of continuous control. TaSIL penalizes deviations in the higher-order Tayler series terms between the learned and expert policies. We show that experts satisfying a notion of incremental input-to-state stability are easy to learn, in the sense that that a small TaSIL-augmented imitation loss over expert trajectories guarantees a small imitation loss over trajectories generated by the learned policy. We provide sample-complexity bounds for TaSIL that scale as $\tilde{\mathcal{O}}(1/n)$ in the realizable setting, for $n$ the number of expert demonstrations. Finally, we demonstrate experimentally the relationship between the robustness of the expert policy and the order of Taylor expansion required in TaSIL, and compare standard Behavior Cloning, DART, and DAgger with TaSIL-loss-augmented variants. In all cases, we show significant improvement over baselines across a variety of MuJoCo tasks.
Video
Chat is not available.
Successful Page Load