Instance-Dependent Near-Optimal Policy Identification in Linear MDPs via Online Experiment Design
{kind=link}
Abstract
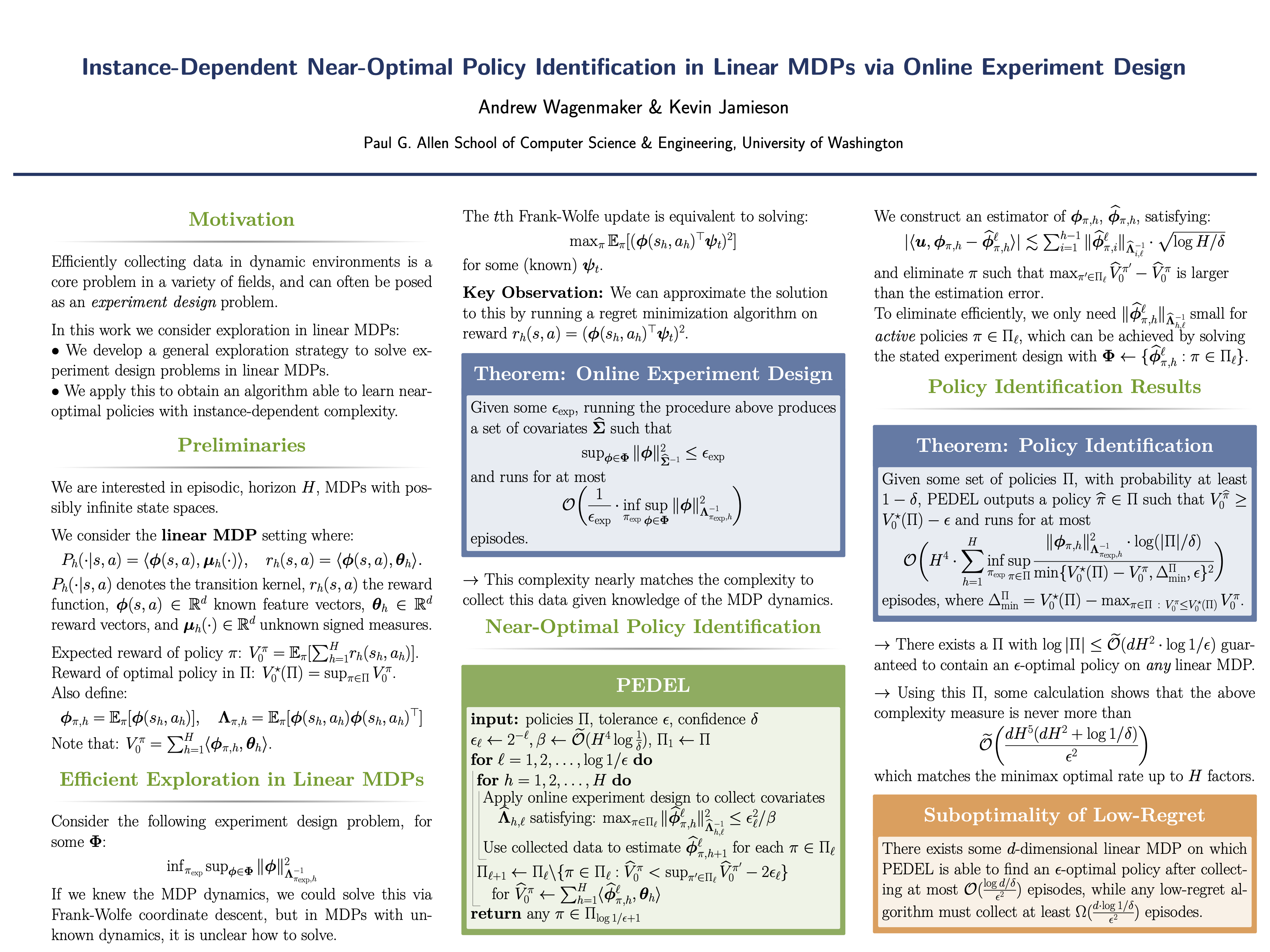
While much progress has been made in understanding the minimax sample complexity of reinforcement learning (RL)---the complexity of learning on the worst-case'' instance---such measures of complexity often do not capture the true difficulty of learning. In practice, on aneasy'' instance, we might hope to achieve a complexity far better than that achievable on the worst-case instance. In this work we seek to understand this instance-dependent'' complexity of learning in the setting of RL with linear function approximation. We propose an algorithm, PEDEL, which achieves a fine-grained instance-dependent measure of complexity, the first of its kind in the RL with function approximation setting, thereby capturing the difficulty of learning on each particular problem instance. Through an explicit example, we show that PEDEL yields provable gains over low-regret, minimax-optimal algorithms and that such algorithms are unable to hit the instance-optimal rate. Our approach relies on a novel online experiment design-based procedure which focuses the exploration budget on thedirections'' most relevant to learning a near-optimal policy, and may be of independent interest.