Truly Deterministic Policy Optimization
{kind=link}
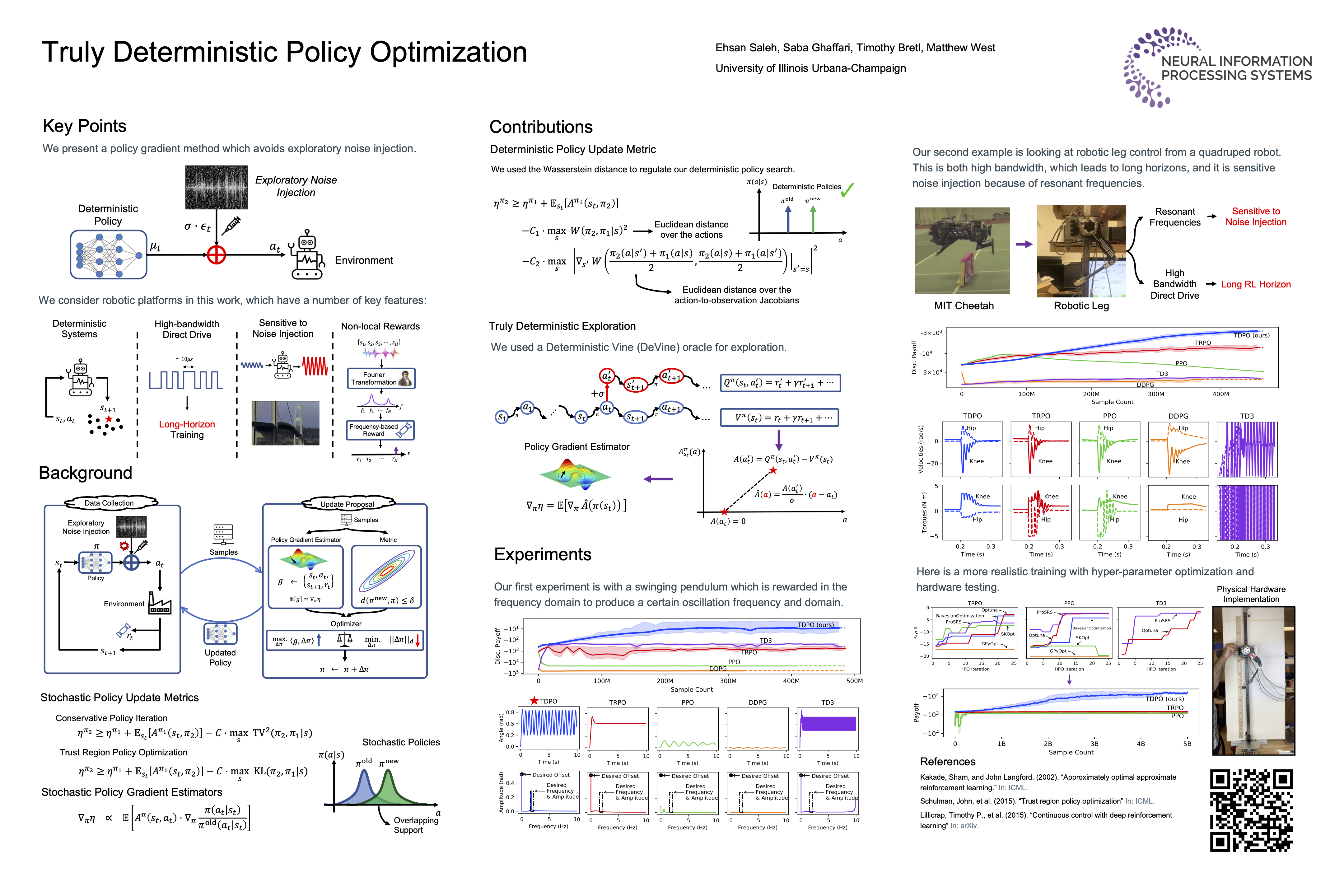
Abstract
In this paper, we present a policy gradient method that avoids exploratory noise injection and performs policy search over the deterministic landscape, with the goal of improving learning with long horizons and non-local rewards. By avoiding noise injection all sources of estimation variance can be eliminated in systems with deterministic dynamics (up to the initial state distribution). Since deterministic policy regularization is impossible using traditional non-metric measures such as the KL divergence, we derive a Wasserstein-based quadratic model for our purposes. We state conditions on the system model under which it is possible to establish a monotonic policy improvement guarantee, propose a surrogate function for policy gradient estimation, and show that it is possible to compute exact advantage estimates if both the state transition model and the policy are deterministic. Finally, we describe two novel robotic control environments---one with non-local rewards in the frequency domain and the other with a long horizon (8000 time-steps)---for which our policy gradient method (TDPO) significantly outperforms existing methods (PPO, TRPO, DDPG, and TD3). Our implementation with all the experimental settings and a video of the physical hardware test is available at https://github.com/ehsansaleh/tdpo .