Influencing Long-Term Behavior in Multiagent Reinforcement Learning
{kind=link}
Abstract
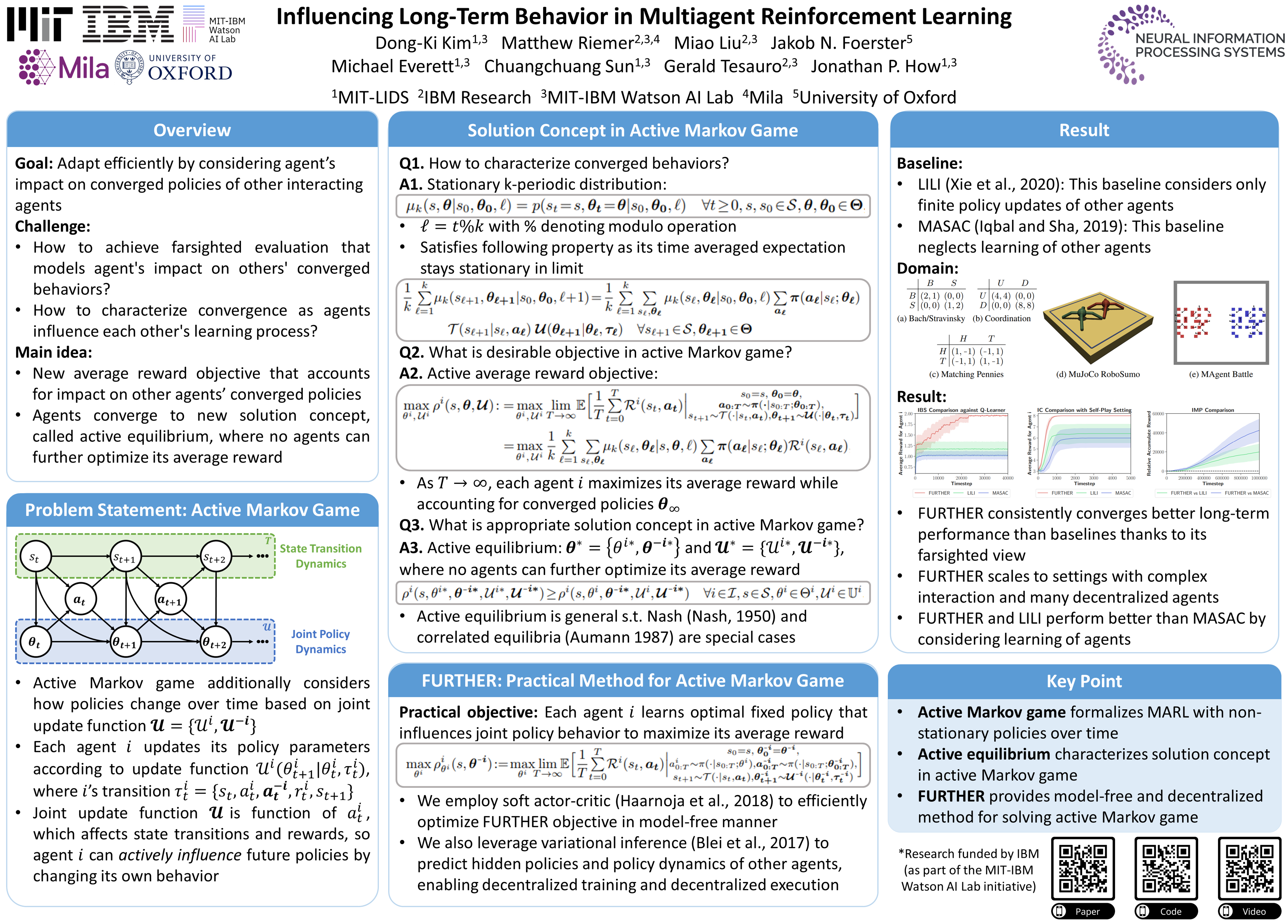
The main challenge of multiagent reinforcement learning is the difficulty of learning useful policies in the presence of other simultaneously learning agents whose changing behaviors jointly affect the environment's transition and reward dynamics. An effective approach that has recently emerged for addressing this non-stationarity is for each agent to anticipate the learning of other agents and influence the evolution of future policies towards desirable behavior for its own benefit. Unfortunately, previous approaches for achieving this suffer from myopic evaluation, considering only a finite number of policy updates. As such, these methods can only influence transient future policies rather than achieving the promise of scalable equilibrium selection approaches that influence the behavior at convergence. In this paper, we propose a principled framework for considering the limiting policies of other agents as time approaches infinity. Specifically, we develop a new optimization objective that maximizes each agent's average reward by directly accounting for the impact of its behavior on the limiting set of policies that other agents will converge to. Our paper characterizes desirable solution concepts within this problem setting and provides practical approaches for optimizing over possible outcomes. As a result of our farsighted objective, we demonstrate better long-term performance than state-of-the-art baselines across a suite of diverse multiagent benchmark domains.