Grounded Reinforcement Learning: Learning to Win the Game under Human Commands
{kind=link}
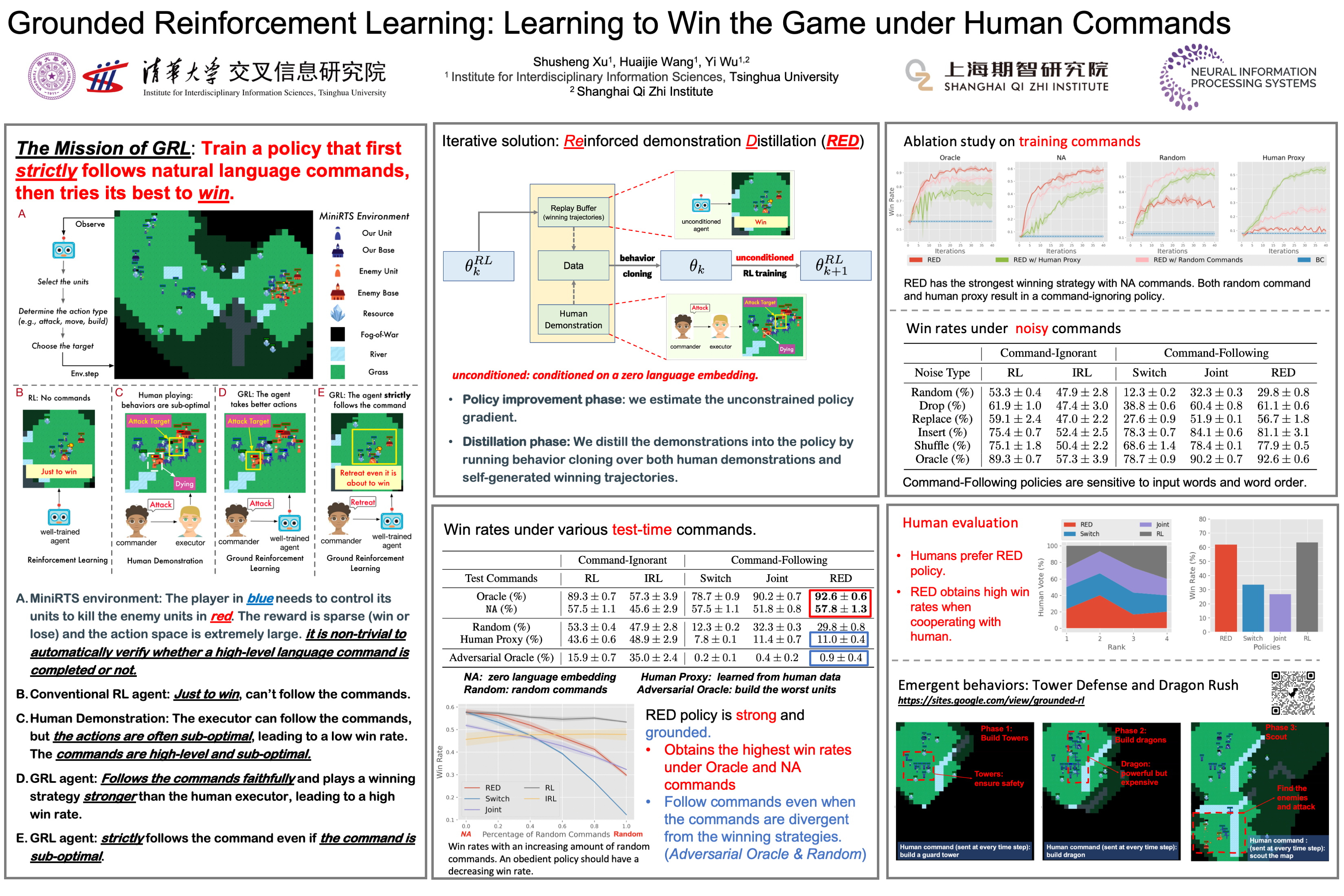
Abstract
We consider the problem of building a reinforcement learning (RL) agent that can both accomplish non-trivial tasks, like winning a real-time strategy game, and strictly follow high-level language commands from humans, like “attack”, even if a command is sub-optimal. We call this novel yet important problem, Grounded Reinforcement Learning (GRL). Compared with other language grounding tasks, GRL is particularly non-trivial and cannot be simply solved by pure RL or behavior cloning (BC). From the RL perspective, it is extremely challenging to derive a precise reward function for human preferences since the commands are abstract and the valid behaviors are highly complicated and multi-modal. From the BC perspective, it is impossible to obtain perfect demonstrations since human strategies in complex games are typically sub-optimal. We tackle GRL via a simple, tractable, and practical constrained RL objective and develop an iterative RL algorithm, REinforced demonstration Distillation (RED), to obtain a strong GRL policy. We evaluate the policies derived by RED, BC and pure RL methods on a simplified real-time strategy game, MiniRTS. Experiment results and human studies show that the RED policy is able to consistently follow human commands and achieve a higher win rate than the baselines. We release our code and present more examples at https://sites.google.com/view/grounded-rl.