Structuring Uncertainty for Fine-Grained Sampling in Stochastic Segmentation Networks
{kind=link}
Abstract
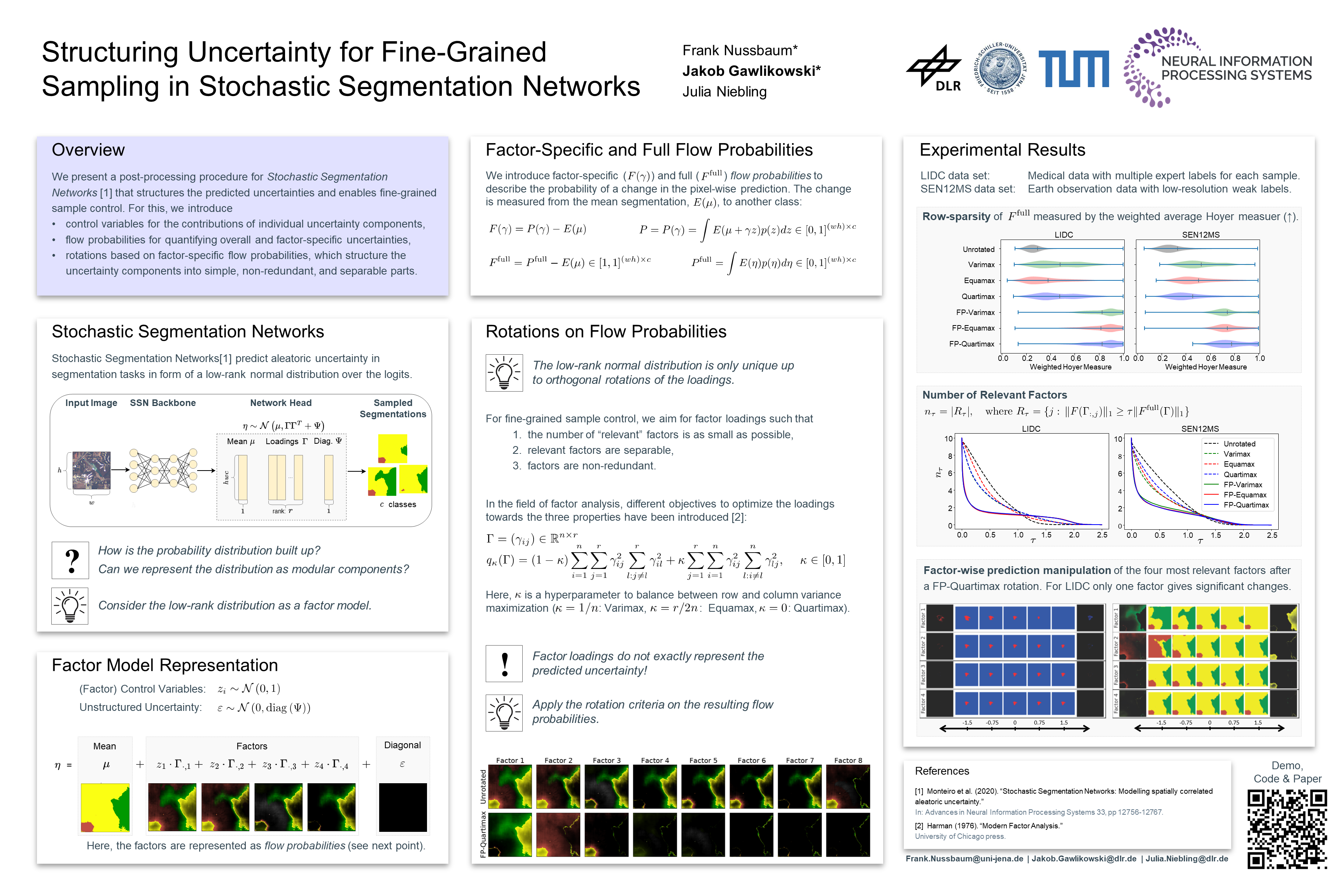
In image segmentation, the classic approach of learning a deterministic segmentation neither accounts for noise and ambiguity in the data nor for expert disagreements about the correct segmentation. This has been addressed by architectures that predict heteroscedastic (input-dependent) segmentation uncertainty, which indicates regions of segmentations that should be treated with care. What is missing are structural insights into the uncertainty, which would be desirable for interpretability and systematic adjustments. In the context of state-of-the-art stochastic segmentation networks (SSNs), we solve this issue by dismantling the overall predicted uncertainty into smaller uncertainty components. We obtain them directly from the low-rank Gaussian distribution for the logits in the network head of SSNs, based on a previously unconsidered view of this distribution as a factor model. The rank subsequently encodes a number of latent variables, each of which controls an individual uncertainty component. Hence, we can use the latent variables (called factors) for fine-grained sample control, thereby solving an open problem from previous work. There is one caveat though--factors are only unique up to orthogonal rotations. Factor rotations allow us to structure the uncertainty in a way that endorses simplicity, non-redundancy, and separation among the individual uncertainty components. To make the overall and factor-specific uncertainties at play comprehensible, we introduce flow probabilities that quantify deviations from the mean prediction and can also be used for uncertainty visualization. We show on medical-imaging, earth-observation, and traffic-scene data that rotation criteria based on factor-specific flow probabilities consistently yield the best factors for fine-grained sampling.