Assistive Teaching of Motor Control Tasks to Humans
{kind=link}
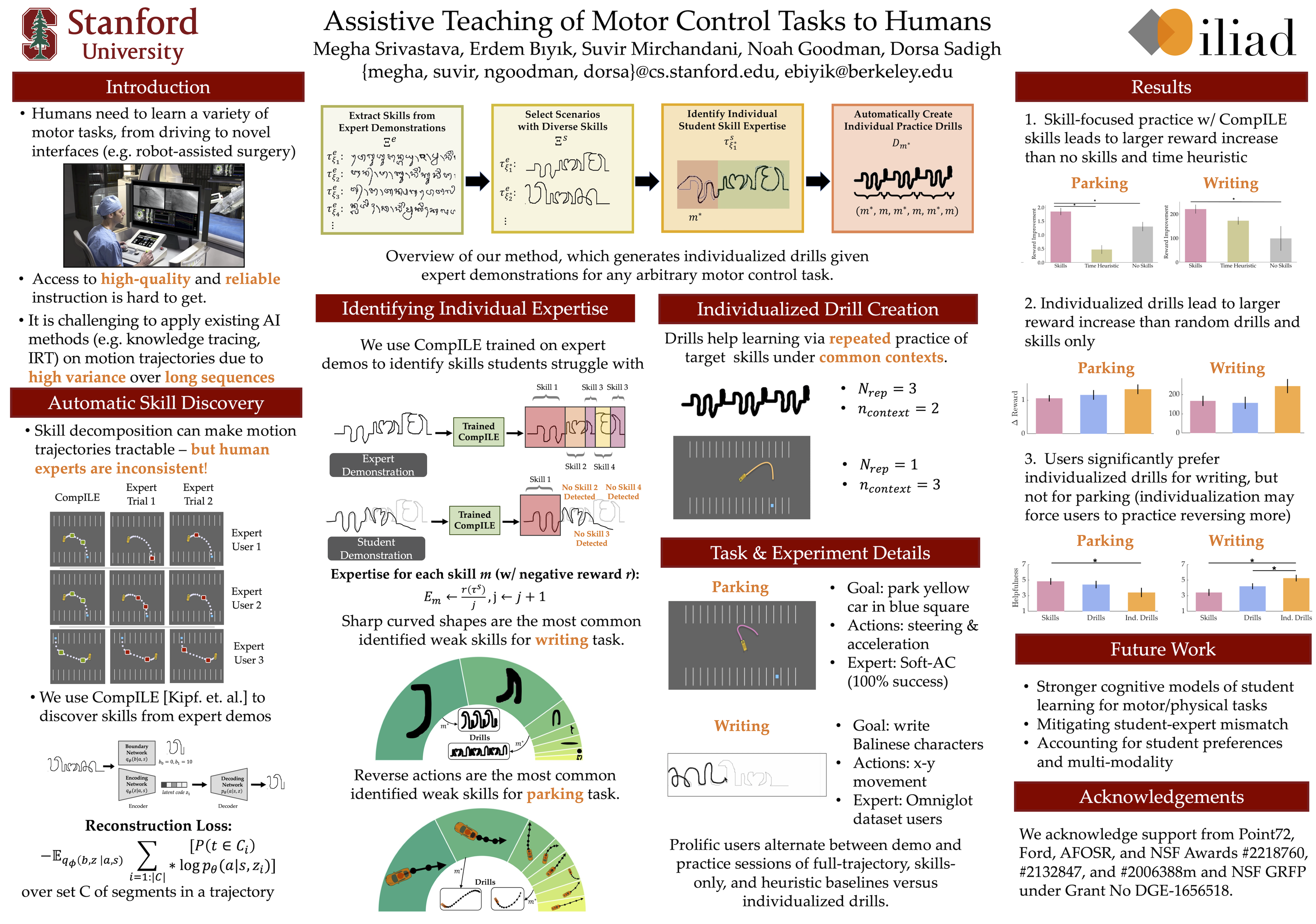
Abstract
Recent works on shared autonomy and assistive-AI technologies, such as assistive robotic teleoperation, seek to model and help human users with limited ability in a fixed task. However, these approaches often fail to account for humans' ability to adapt and eventually learn how to execute a control task themselves. Furthermore, in applications where it may be desirable for a human to intervene, these methods may have inhibited their ability to learn how to succeed with full self-control. In this paper, we focus on the problem of assistive teaching of motor control tasks such as parking a car or landing an aircraft. Despite their ubiquitous role in humans' daily activities and occupations, motor tasks are rarely taught in a uniform way due to their high complexity and variance. We propose an AI-assisted teaching algorithm that leverages skill discovery methods from reinforcement learning (RL) literature to (i) break down any motor control task into teachable skills, (ii) construct novel drill sequences, and (iii) individualize curricula to students with different capabilities. Through an extensive mix of synthetic and user studies on two motor control tasks - parking a car with a joystick and writing characters from the Balinese alphabet - we show that assisted teaching with skills improve student performance by around 40% compared to practicing full trajectories without skills, and practicing with individualized drills can result in up to 25% further improvement.