Learning interacting dynamical systems with latent Gaussian process ODEs
{kind=link}
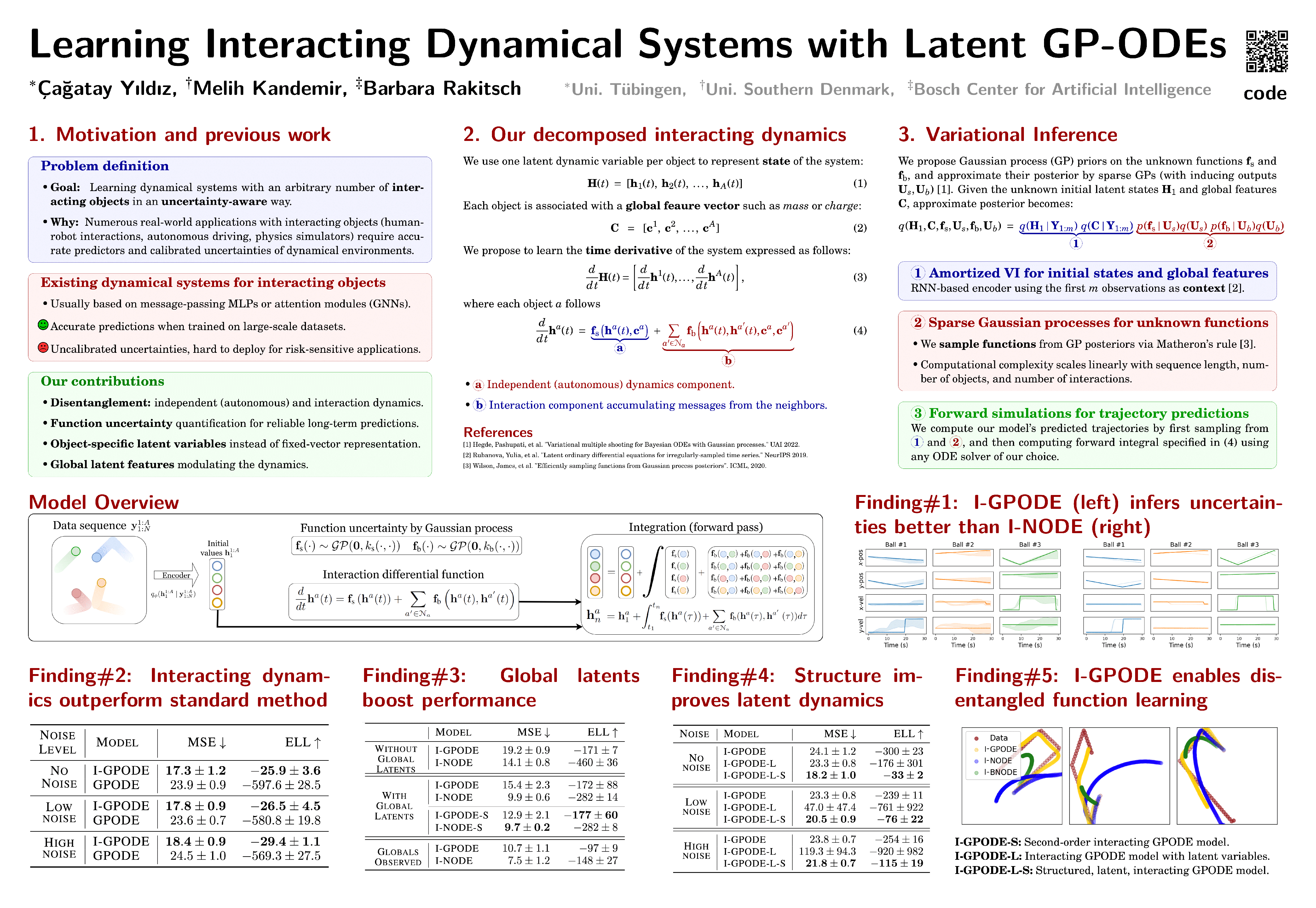
Abstract
We study uncertainty-aware modeling of continuous-time dynamics of interacting objects. We introduce a new model that decomposes independent dynamics of single objects accurately from their interactions. By employing latent Gaussian process ordinary differential equations, our model infers both independent dynamics and their interactions with reliable uncertainty estimates. In our formulation, each object is represented as a graph node and interactions are modeled by accumulating the messages coming from neighboring objects. We show that efficient inference of such a complex network of variables is possible with modern variational sparse Gaussian process inference techniques. We empirically demonstrate that our model improves the reliability of long-term predictions over neural network based alternatives and it successfully handles missing dynamic or static information. Furthermore, we observe that only our model can successfully encapsulate independent dynamics and interaction information in distinct functions and show the benefit from this disentanglement in extrapolation scenarios.