Reinforcement Learning in a Birth and Death Process: Breaking the Dependence on the State Space
Jonatha Anselmi ⋅ Bruno Gaujal ⋅ Louis-Sébastien Rebuffi
Keywords:
queueing systems
Markov Decision Processes
Regret Analysis
structured reinforcement learning
2022 Poster
{kind=link}
Abstract
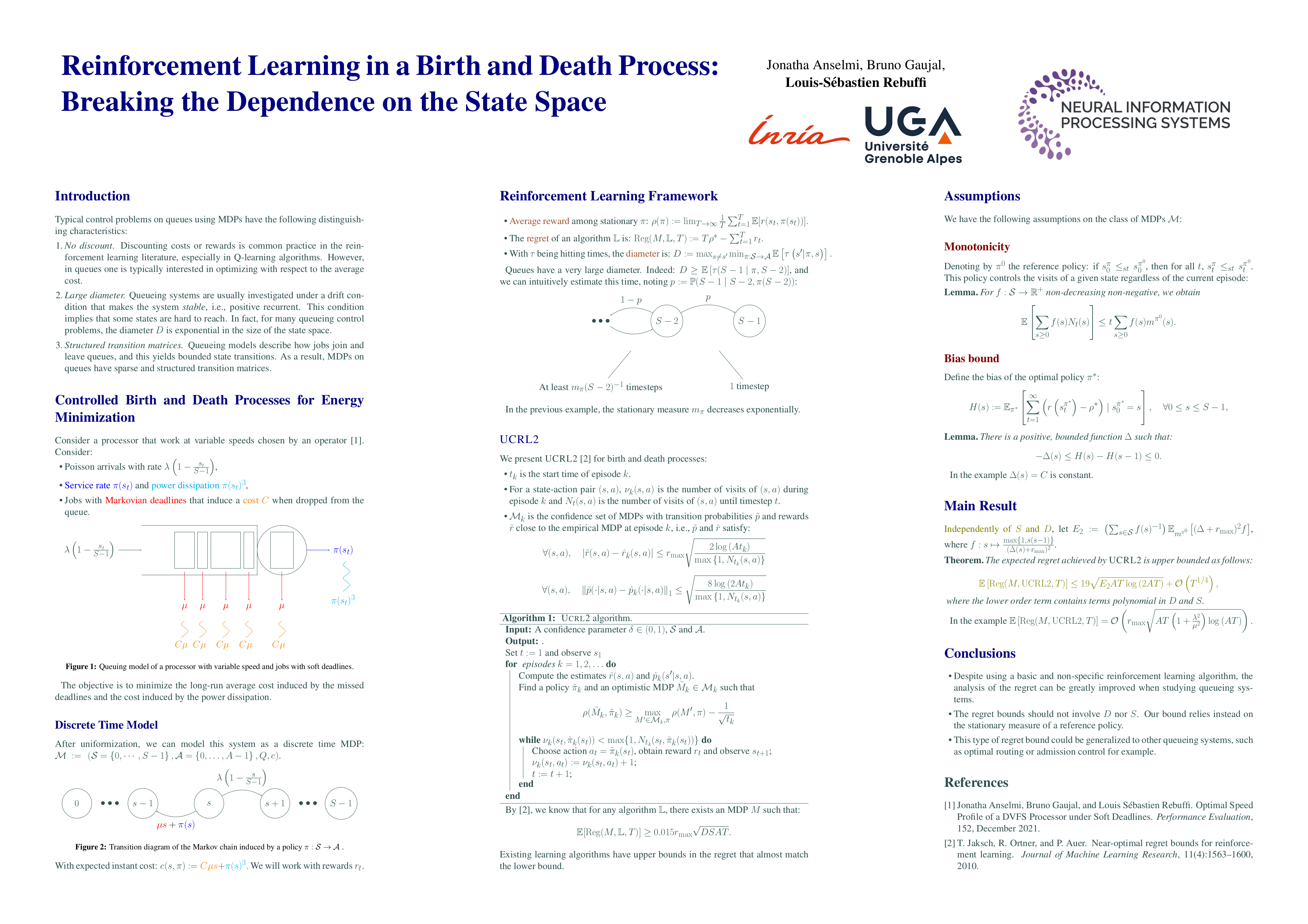
In this paper, we revisit the regret of undiscounted reinforcement learning in MDPs with a birth and death structure. Specifically, we consider a controlled queue with impatient jobs and the main objective is to optimize a trade-off between energy consumption and user-perceived performance. Within this setting, the diameter $D$ of the MDP is $\Omega(S^S)$, where $S$ is the number of states. Therefore, the existing lower and upper bounds on the regret at time $T$, of order $O (\sqrt{DSAT})$ for MDPs with $S$ states and $A$ actions, may suggest that reinforcement learning is inefficient here. In our main result however, we exploit the structure of our MDPs to show that the regret of a slightly-tweaked version of the classical learning algorithm UCRL2 is in fact upper bounded by $\tilde{\mathcal{O}} (\sqrt{E_2AT})$ where $E_2$ is a weighted second moment of the stationary measure of a reference policy. Importantly, $E_2$ is bounded independently of $S$. Thus, our bound is asymptotically independent of the number of states and of the diameter. This result is based on a careful study of the number of visits performed by the learning algorithm to the states of the MDP, which is highly non-uniform.
Video
Chat is not available.
Successful Page Load