Unsupervised Adaptation from Repeated Traversals for Autonomous Driving
{kind=link}
Abstract
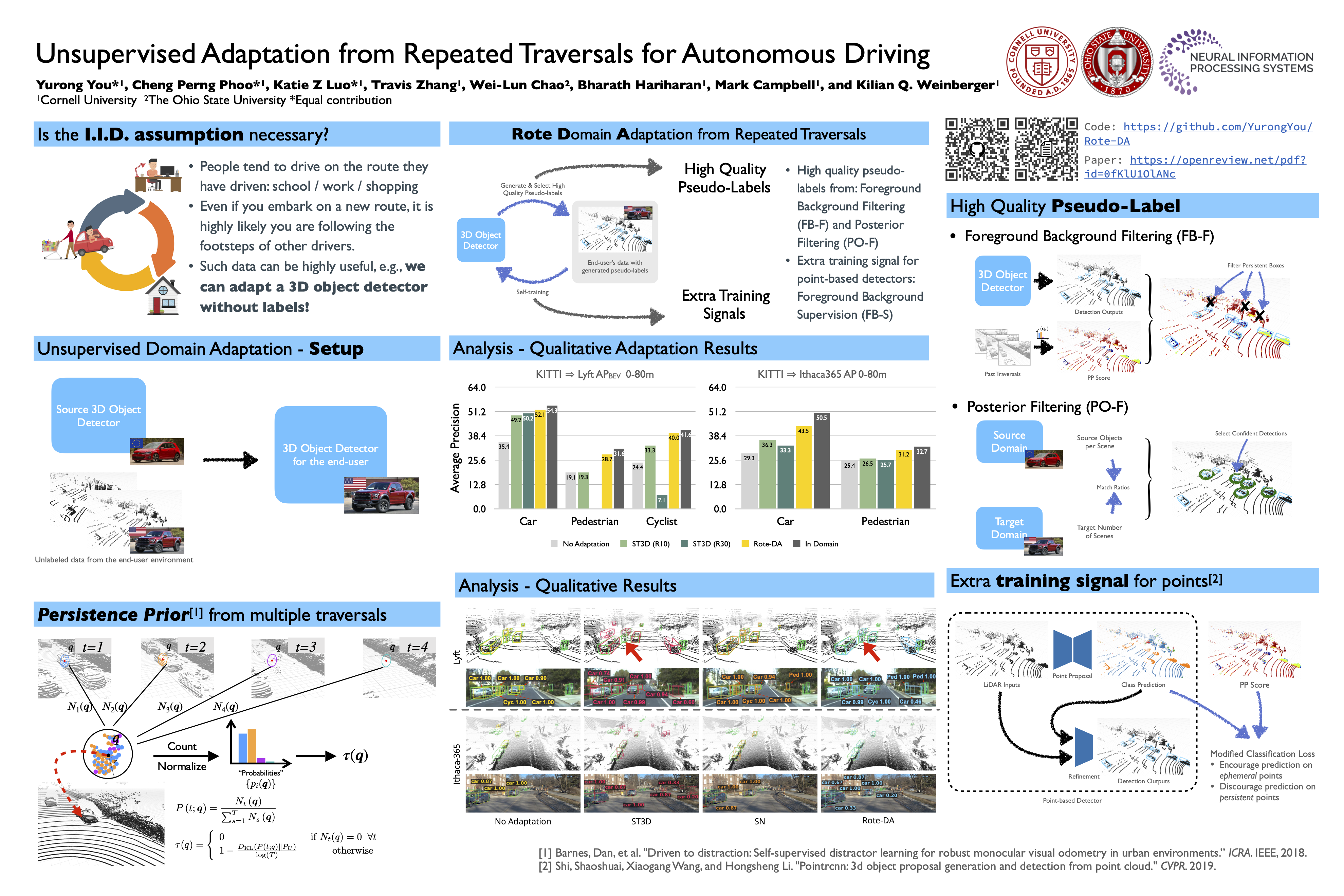
For a self-driving car to operate reliably, its perceptual system must generalize to the end-user's environment --- ideally without additional annotation efforts. One potential solution is to leverage unlabeled data (e.g., unlabeled LiDAR point clouds) collected from the end-users' environments (i.e. target domain) to adapt the system to the difference between training and testing environments. While extensive research has been done on such an unsupervised domain adaptation problem, one fundamental problem lingers: there is no reliable signal in the target domain to supervise the adaptation process. To overcome this issue we observe that it is easy to collect unsupervised data from multiple traversals of repeated routes. While different from conventional unsupervised domain adaptation, this assumption is extremely realistic since many drivers share the same roads. We show that this simple additional assumption is sufficient to obtain a potent signal that allows us to perform iterative self-training of 3D object detectors on the target domain. Concretely, we generate pseudo-labels with the out-of-domain detector but reduce false positives by removing detections of supposedly mobile objects that are persistent across traversals. Further, we reduce false negatives by encouraging predictions in regions that are not persistent. We experiment with our approach on two large-scale driving datasets and show remarkable improvement in 3D object detection of cars, pedestrians, and cyclists, bringing us a step closer to generalizable autonomous driving.