Runtime Monitors for Operational Design Domains of Black-Box ML-Models
{kind=link}
Abstract
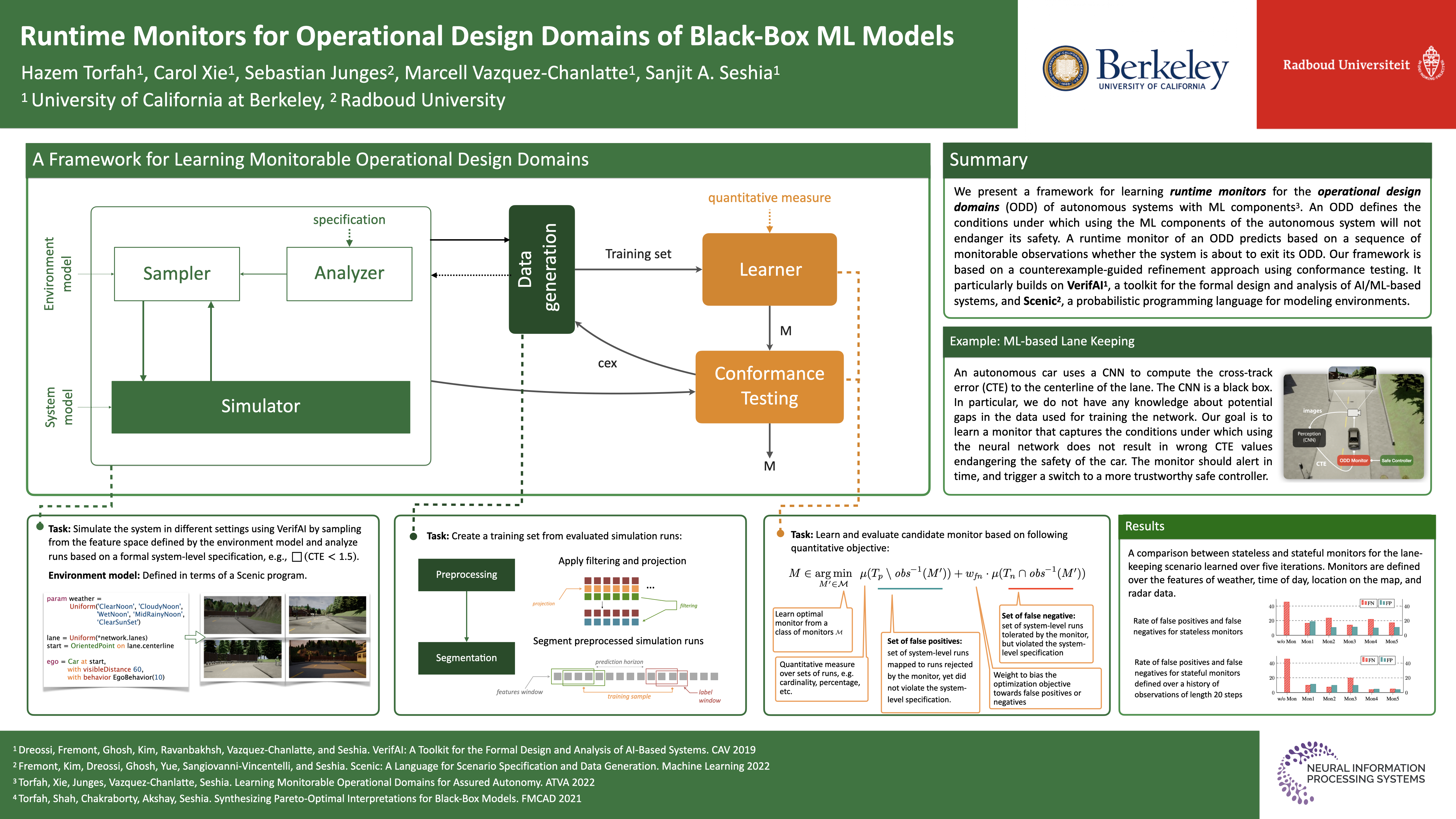
Autonomous systems are increasingly relying on machine learning (ML) components to perform a variety of complex tasks in perception, prediction, and control. To guarantee the safety of ML-based autonomous systems, it is important to capture their operational design domain (ODD), i.e., the conditions under which using the ML components does not endanger the safety of the system. In this paper, we present a framework for learning runtime monitors for ODDs of autonomous systems with black-box ML components. A runtime monitor of an ODD predicts based on a sequence of monitorable observationswhether the system is about to exit its ODD. We particularly investigate the learning of optimal monitors based on counterexample-guided refinement and conformance testing. We evaluate our approach on a case study from the domain of autonomous driving.